Publications
Last update: August 8, 2024
P: Patent | B: Book | BC: Book Chapter | J: Journal Paper | C: Conference/Symposium/Workshop Paper | I: Preprint
 (external link)
(external link)
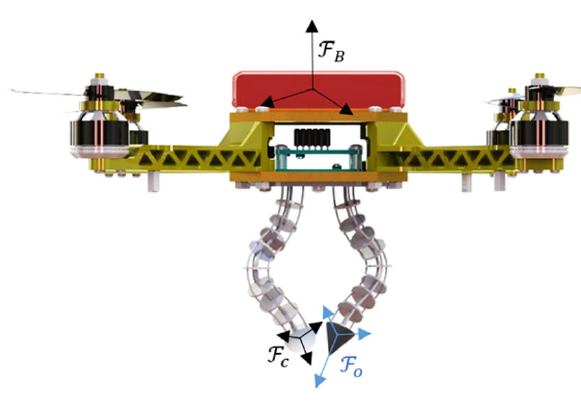
[C167] Amiri, N., Sepahvand, S., Mantegh, I., and Janabi-Sharifi, F., “Systematic Analysis of Coupling Effects on Closed-Loop and Open-Loop Performance in Aerial Continuum Manipulators (external link) ,” Proc. 2026 Unmanned Aircraft Systems (ICUAS’26), Crete, Greece, June 2026.
[J134] Ghorbani, S., Samadi Khoshkhoo, Z., and Janabi-Sharifi, F., “Vision-guided interaction control for dual arm aerial continuum manipulation systems,” accepted to Int. J. Control, Autom. Syst. (IJCAS), Jan 2026.
 (external link)
(external link)
[C166] Sepahvand, S., Latifinavid, M., Janabi-Sharifi, F., and Mantegh, I., “Experimental study of autonomous UAV landing in using fuzzy logic and RGBD-enhanced visual SLAM (external link) ,” Proc. 44 th AIAA DATC/IEEE Digital Avionics Systems Conference (DASC), Montreal, QC, Sep. 14-8, 2025.
![[J133] Masnavi, H., Singh, A. K., and Janabi-Sharifi, F., “Differentiable-optimization based neural policy for occlusion-aware target tracking,” IEEE Robotics and Automation Letters, 2025.](/content/dam/rmal/papers_snapshot/ral_2025_houman.png "[J133] Masnavi, H., Singh, A. K., and Janabi-Sharifi, F., “Differentiable-optimization based neural policy for occlusion-aware target tracking,” IEEE Robotics and Automation Letters, 2025.") (external link)
(external link)
[J133] Masnavi, H., Singh, A. K., and Janabi-Sharifi, F., “Differentiable-optimization based neural policy for occlusion-aware target tracking (external link) ,” IEEE Robotics and Automation Letters, 2025.
![[C165] Barbeau, M., Janabi-Sharifi, F., and Masnavi, H., “A quantum annealing approach to target tracking,” IEEE Int. Conf. Robot. Automat (ICRA 2025), May 2025, Atlanta, GA.](/content/dam/rmal/papers_snapshot/icra_2025_houman.png "[C165] Barbeau, M., Janabi-Sharifi, F., and Masnavi, H., “A quantum annealing approach to target tracking,” IEEE Int. Conf. Robot. Automat (ICRA 2025), May 2025, Atlanta, GA.") (external link)
(external link)
[C163] Barbeau, M., Janabi-Sharifi, F., and Masnavi, H., “A quantum annealing approach to target tracking (external link) ,” IEEE Int. Conf. Robot. Automat (ICRA 2025), May 2025, Atlanta, GA.
![[C162] Sajadi, S., Mehta, V., Janabi-Sharifi, F., and Mantegh, I., “Cellular connectivity risk-aware flight path planning for BVLOS UAV operations,” Proc. 2025 Unmanned Aircraft Systems (ICUAS’25), Atlanta, GA, May 2025.](/content/dam/rmal/papers_snapshot/icuas_2025_Sina.png "[C162] Sajadi, S., Mehta, V., Janabi-Sharifi, F., and Mantegh, I., “Cellular connectivity risk-aware flight path planning for BVLOS UAV operations,” Proc. 2025 Unmanned Aircraft Systems (ICUAS’25), Atlanta, GA, May 2025.") (external link)
(external link)
[C162] Sajadi, S., Mehta, V., Janabi-Sharifi, F., and Mantegh, I., “Cellular connectivity risk-aware flight path planning for BVLOS UAV operations (external link) ,” Proc. 2025 Unmanned Aircraft Systems (ICUAS’25), Atlanta, GA, May 2025.
[C167] Amiri, N., Sepahvand, S., Mantegh, I., and Janabi-Sharifi, F., “Systematic Analysis of Coupling Effects on Closed-Loop and Open-Loop Performance in Aerial Continuum Manipulators (external link) ” Proc. 2026 Unmanned Aircraft Systems (ICUAS’26), Crete, Greece, June 2026.
[J133] Ghorbani, S., Samadi Khoshkhoo, Z., and Janabi-Sharifi, F., “Vision-guided interaction control for dual arm aerial continuum manipulation systems,” accepted to Int. J. Control, Autom. Syst. (IJCAS), Jan 2026. (Impact Factor: 2.9).
[J133] Ghorbani, S., Samadi Khoshkhoo, Z., and Janabi-Sharifi, F., “Vision-guided interaction control for dual arm aerial continuum manipulation systems,” accepted to Int. J. Control, Autom. Syst. (IJCAS), Jan 2026. (Impact Factor: 2.9).
[C165] Sepahvand, S., Latifinavid, M., Janabi-Sharifi, F., and Mantegh, I., “Experimental study of autonomous UAV landing in using fuzzy logic and RGBD-enhanced visual SLAM (external link) ,” Proc. 44 th AIAA DATC/IEEE Digital Avionics Systems Conference (DASC), Montreal, QC, Sep. 14-8, 2025.
[C164] Masnavi, H., Singh, A. K., and Janabi-Sharifi, F., “Differentiable-optimization based neural policy for occlusion-aware target tracking (external link) ,” IEEE Conf. Robot. Automat., (ICRA 2025), Atlanta, GA, May 2025.
[C163] Barbeau, M., Janabi-Sharifi, F., and Masnavi, H., “A quantum annealing approach to target tracking (external link) ,” IEEE Int. Conf. Robot. Automat (ICRA 2025), May 2025, Atlanta, GA.
[C162] Sajadi, S., Mehta, V., Janabi-Sharifi, F., and Mantegh, I., “Cellular connectivity risk-aware flight path planning for BVLOS UAV operations (external link) ,” Proc. 2025 Unmanned Aircraft Systems (ICUAS’25), Atlanta, GA, May 2025.
[J132] Nazari, A., Catania, J., Sadeghian, S., Jalali, A., Masnavi, H., Janabi-Sharifi, F., and Zareinia, K., “A master-follower teleoperation system for robotic catheterization: design, characterization, and tracking control (external link) ,” accepted to International Journal of Medical Robotics and Computer Assisted Surgery, April 24, 2025.
[J131] Amiri, N., and Janabi-Sharifi, F. "High-Performance Coupled Kinematics of Aerial Continuum Manipulation Systems for Control Applications (external link) ," Robotics and Autonomous Systems, April 9, 2025.
[J130] Garg, S., Goharimanesh, M., Sajjadi, S., and Janabi-Sharifi, F. “Autonomous control of soft robots using safe reinforcement learning and covariance matrix adaptation (external link) ,” Engineering Applications of Artificial Intelligence, accepted, April 3, 2025.
[C161] Sepahvand, S., Amiri, N., Janabi-Sharifi, F., “Deep Visual Servoing of an Aerial Robot Using Keypoint Feature Extraction (external link) ,” accepted to 2025 Int. Conf. Unmanned Aircraft Systems (ICUAS’25), Charlotte, North Carolina, USA, May 2025.
[J129] Garg, S., Masnavi, H., Fidan, B., and Janabi-Sharifi, F., “Dual agent learning based aerial trajectory tracking (external link) ,” IEEE Robotics and Automation Letters, accepted, March 14. 2025.
[J128] Faraji, J., Keighobadi, J., and Janabi-Sharifi, F., “Design and implementation of an adaptive extended Kalman filter with interval type-3 fuzzy set for an attitude and heading reference system,” Signal Processing, vol. 233, p. 109947, Aug. 2025.
[J127] Sepahvand, S., Janabi-Sharifi, F., Masnavi, Aghili F., Amiri, N. (2024). Robust Image-based Visual Servoing of an Aerial Robot Using Self-organizing Neural Networks (external link) . Int. J. Control Autom. Syst. 22, 3762–3776.
[J126] Masnavi, H., Singh, A. K., & Janabi-Sharifi, F. (2024). Differentiable-Optimization Based Neural Policy for Occlusion-Aware Target Tracking (external link) , IEEE Robotics and Automation Letters.
[J125] Sepahvand S., Amiri N., Masnavi H., Mantegh I., & Janabi-Sharifi F. (2024). "A Novel Fuzzy Image-Based UAV Landing Using RGBD Data and Visual SLAM (external link) ," Drones, vol. 8, no. 10, p. 594, Oct. 2024.
[J124] Faraji, J., Keighobadi, J., and Janabi-Sharifi, F., “Design and implementation of an adaptive unscented Kalman filter with interval Type-3 fuzzy set for an attitude and heading reference system considering gyroscope bias (external link) ,” Mechanical Systems and Signal Processing, vol. 223, Jan. 2025.
[C160] N. Amiri, G. Wang and F. Janabi-Sharifi, "Keypoint Detection Technique for Image-Based Visual Servoing of Manipulators (external link) ," 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), Bari, Italy, 2024, pp. 3557-3562.
[C159] Garg, S., Masnavi, H., Fidan, B., Janabi-Sharifi, F., and Mantegh, I., “Benchmarking off-policy deep reinforcement learning algorithms for UAV path planning (external link) ,” accepted to 2024 Int. Conf. Unmanned Aircraft Systems (ICUAS’24), Chania, Crete, June 2024.
[J123] Uthayasooriyan, A., Vanegas, F., Jalali, A., Manaswi Digumarti, K., Janabi-Sharifi, F., and Gonzalez, F., “Tendon driven continuum robots for aerial manipulation - A survey of fabrication methods (external link) ,” Drones, vol. 8, no. 6, p. 269, Jun 2024.
[J122] Abbasi-Hashemi, T., Janabi-Sharifi, F., Cheema, A., and Zareinia, K. “A haptic guidance system for catheter navigation with different kinesthetic feedback profiles (external link) ,” International Journal of Medical Robotics and Computer-Assisted Surgery, vol. 20, no. 3, p. e2638, Jun 2024.
[C158] Sepahvand, S., Wang, G., and Janabi-Sharifi, F., “Image-to-joint inverse kinematic of a supportive continuum arm using deep learning (external link) ,” accepted to 21 st Conf. Robots and Vision (CRV), Guelph, ON, May 27-31, 2024.
[C157] Mehrkish, A., Goharimanesh, M., Janabi-Sharifi, F., and Norouzi-Ghazbi, S., “Optimization-based grasp synthesis of continuum robots,” CSME Congress, Toronto, Canada, May 2024.
[C156] Mesdaghi, S., Hasanzadeh, R.P.R., and Janabi-Sharifi, F., “Finger-hand rehabilitation using DNN-based gesture recognition of low-cost webcam images (external link) ,” Proc. 2024 International Machine Vision and Image Processing Conference (MVIP), Mar. 2024, Tehran, Iran, pp. 1-6.
[J121] Mehrkish, A., and Janabi-Sharifi, F., “Experimental evaluation of a small-sized continuum robot for grasping tasks (external link) ,” Trans. CSME, accepted, Feb. 12, 2024.
[J120] Jalali, A. and Janabi-Sharifi, F. “Dynamic manipulation and stiffness modulation of cooperative continuum robots: theory and experiment (external link) ” J. Mechanisms and Robotics, accepted, January 27, 2024.
[C155] Sajjadi, S., Bittick, J., Janabi-Sharifi, F., and Mantegh, I., “A Robust and Adaptive Sensor Fusion Approach for Indoor UAV Localization* (external link, opens in new window) ” International Conference on Unmanned Aerial Systems (ICUAS), Warsaw, Poland, June 6–9, 2023, pp. 441–447.
[J120] Kouh Soltani, M., Khanmohammadi, S., Ghalichi, F., and Janabi-Sharifi, F., “Autonomous three-dimensional sensor-assisted hybrid force/position control for tendon-driven catheters,” (external link, opens in new window) The European Physical Journal Plus, vol. 138, no. 6, p. 504, Jun. 2023.
[J119] Hashemi, S. H., Janabi-Sharifi, F., and Jalali, A., “Robust Global stabilization of aerial continuum manipulation systems via hybrid feedback,” (external link, opens in new window) ISA Transactions, vol. 138, pp. 160–167, Jul. 2023.
[J118] Abdulhafiz, I., and Janabi-Sharifi, F., “A Hybrid Approach to 3D Shape Estimation of Catheters using Ultrasound Images,” (external link, opens in new window) IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 1912–1919, Apr. 2023.
[J117] Ghorbani, S., Samadikhoshkho, Z., and Janabi-Sharifi, F., “Dual-arm aerial continuum manipulation systems: modeling, pre-grasp planning, and control,” (external link, opens in new window) Nonlinear Dynamics, vol. 11, no. 8, pp. 7339–7355, Jan. 2023.
[J116] Razmjooei, H., Palli, G., Janabi-Sharifi, F., and Alirezaee, S., “Adaptive fast-finite-time extended state observer design for uncertain electro-hydraulic systems,” (external link, opens in new window) European Journal of Control, vol. 69, p. 100749, Jan. 2023
[J115] Mehrkish, A., Janabi-Sharifi, F., Goharimanesh, M., and Norouzi-Ghazbi, S., “Multiple aspects grasp quality evaluation in underactuated grasp of continuum robots,” (external link, opens in new window) Intelligent Service Robotics, vol. 16, no. 1, pp. 33–48, Nov. 2022.
[C154] Zar, H.A., Goharimanesh, M., and Janabi-Sharifi, F., “Mathematical Modeling and Machine Learning for Force Estimation on a Planar Catheter,” (external link, opens in new window) CSME International Congress (CSME 2022), Edmonton, Canada, June 5–8, 2022, pp. 1–5.
[C153] Abdulhafiz, I., Nazari, A.A., Abbasi-Hashemi, T., Jalali, A., Zareinia, K., Saeedi, S., and Janabi-Sharifi, F., “Deep Direct Visual Servoing of Tendon-Driven Continuum Robots,” (external link, opens in new window) IEEE International Conference on Automation Science and Engineering (CASE 2022), Mexico City, Mexico, August 20–24, 2022, pp. 1977–1984.
[J114] Jalali, A. and Janabi-Sharifi, F., “Aerial continuum manipulation: A new platform for compliant aerial manipulation,” (external link, opens in new window) Frontiers in Robotics and AI, vol. 9, p. 903877, Aug. 2022.
[J113] Ghorbani, S., and Janabi-Sharifi, F., “Extended Kalman filter state estimation for aerial continuum manipulation systems,” (external link, opens in new window) IEEE Sensors Letters, vol. 6, no. 8, p. 7002704, Jul. 2022.
[J112] Fallah, M.H., Janabi-Sharifi, F., Sajjadi, S., and Mehrandezh, M., “A visual predictive control framework for robust and constrained multi-agent formation control,” (external link, opens in new window) Journal of Intelligent and Robotic Systems, vol. 105, no. 4, p. 72, Jul. 2022.
[J111] Sajjadi, S., Mehrandezh, M., and Janabi-Sharifi, F., “A cascaded and adaptive visual predictive control approach for real-time dynamic visual servoing,” (external link, opens in new window) Drones, vol. 6, no. 5, p. 127, May 2022.
[J110] Ali, Y., Beheshti, S., Janabi-Sharifi, F. , Yousefi Rezaii, T., Cheema A., and Pedrosa, J., “A hybrid approach for tracking borders in echocardiograms,” (external link, opens in new window) Signal, Image and Video Processing, vol. 17, no. 2, pp. 453–461, Apr. 2022.
[J109] Li, J., and Janabi-Sharifi, F., “Public opinion about the benefit, risk, and acceptance of aerial manipulation systems,” (external link, opens in new window) IEEE Transactions on Human-Machine Systems, vol. 52, no. 5, pp. 1069–1085, Apr. 2022.
[J108] Nazari, A. A., Zareinia, K., and Janabi-Sharifi, F., “Visual Servoing of Continuum Robots: Methods, Challenges, and Prospects,” (external link, opens in new window) International Journal of Medical Robotics and Computer Assisted Surgery, vol. 18, no. 3, p. e2384, Feb. 2022.
[J107] Azimirad, V., Tayefe Ramezanlou, M., Valizadeh Sotubadi, S., and Janabi-Sharifi, F., “A consecutive hybrid spiking-convolutional (CHSC) neural controller for sequential decision making in robots,” (external link, opens in new window) Neurocomputing, vol. 490, no. 2, pp. 319–336, Jun. 2022.
[J106] Samadikhoshko, Z., Ghorbani, S., and Janabi-Sharifi, F., "Vision-based reduced-order adaptive control of aerial continuum manipulation systems," (external link, opens in new window) Aerospace Science and Technology, vol. 121, p. 107322, Feb. 2022.
[J105] Jalali, A. and Janabi-Sharifi, F., “Dynamic Modeling of Tendon-Driven Co-manipulative Continuum Robots,” (external link) IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 1643–1650, Apr. 2022.
[J104] Mehrkish, A. and Janabi-Sharifi, F., “Grasp synthesis for continuum robots,” (external link, opens in new window) Mechanism and Machine Theory, vol. 168, p. 104575, Feb. 2022.
[J103] Samadikhoshko, Z., Ghorbani, S., and Janabi-Sharifi, F., “Coupled dynamic modeling and control of aerial continuum manipulation systems,” (external link, opens in new window) Applied Sciences, vol. 11, no. 19, p. 9108, Sep. 2021.
[J102] Mehrkish, A., and Janabi-Sharifi, F., “A comprehensive grasp taxonomy of continuum robots,” (external link, opens in new window) Robotics and Autonomous Systems, vol. 145, no. 11, p. 103860, 2021.
[J101] Jabbari, M., Zakeri, M., Janabi-Sharifi, F., and Norouzi-Ghazbi, S., “Inverse kinematics of concentric tube robots in the presence of environmental constraints,” (external link, opens in new window) Applied Bionics and Biomechanics, vol. 2021, p. 4107732, Aug. 2021.
[J100] Norouzi Ghazbi, S., Mehrkish, A., Fallah, M.H. M., and Janabi-Sharifi, F., “Constrained visual predictive control of tendon-driven continuum robots,” (external link, opens in new window) Robotics and Autonomous Systems, vo. 145, p. 103856, Nov. 2021.
[J99] Norouzi Ghazbi, S., and Janabi-Sharifi, F., “A switching image-based visual servoing approach for cooperative continuum robots,” (external link, opens in new window) Journal of Intelligent and Robotic Systems, vol. 103, no. 3, p. 42, Oct. 2021.
[J98] Ali, Y., Beheshti, S. and Janabi-Sharifi, F., “Echocardiogram segmentation using active shape model and mean squared eigenvalue error,” (external link, opens in new window) Biomedical Signal Processing and Control, vol. 69, p. 102807, Aug. 2021.
[J97] Janabi-Sharifi, F., Jalali, A., and Walker, I., “Cosserat rod-based dynamic modeling of tendon-driven continuum robots: A tutorial,” (external link, opens in new window) IEEE Access, vol. 9, pp. 68703–68719, May 2021.
[J96] Keighobadi, J., Faraji, J., Janabi-Sharifi, F., and Hamed, M. A., “Design and experimental evaluation of block-pulse functions and Legendre polynomial observer for attitude and heading reference system,” (external link, opens in new window) ISA Transactions, vol. 116, pp. 232–244, Oct. 2021.
[J95] Nazari, A. A., Janabi-Sharifi, F., and Zareinia, K., “Image-based force estimation: A review,” (external link, opens in new window) IEEE Sensors Journal, vol. 21, no. 7, pp. 8805–8830, Apr. 2021.
[J94] Nasirian, B., Mehrandezh, M., and Janabi-Sharifi, F., “Efficient coverage path planning for mobile disinfecting robots using graph-based representation of environment,” (external link, opens in new window) Frontiers in AI and Robotics, vol. 8, p. 624333, Mar. 2021.
[J93] Rahimizadeh, N., Hasanzadeh, R.P.R., and Janabi-Sharifi, F., “An optimized non-local LMMSE approach for speckle noise reduction of ultrasound images,” (external link, opens in new window) Multimedia Tools and Applications, vol. 80, pp. 9231–9253, Mar. 2021.
[J92] Ali, Y., Janabi-Sharifi, F., and Beheshti, S., “Echocardiographic image segmentation using deep learning,” (external link, opens in new window) Biomedical Signal Processing and Control, vol. 64, p. 102248, Feb. 2021.
[J91] Fallah, M.M.H., and Janabi-Sharifi, F., “Conjugated visual predictive control for constrained visual servoing,” (external link, opens in new window) Journal of Intelligent & Robotic Systems, vol. 101, no. 2, p. 33, Jan. 2021.
[J90] Norouzi, S., Mehrkish, A., Abdulhafiz, I., Abbasihashemi, T., Mahdi, A., Janabi-Sharifi, F., “Design and experimental evaluation of an automated catheter operating system,” (external link, opens in new window) Artificial Organs, vol. 45, no. 6, pp. E171–E186, Jun. 2021.
[C152] Sajjadi, S., Fallah, M.M.H., Mehrandezh, M., and Janabi-Sharifi, F., “Stochastic image-based visual predictive control,” (external link, opens in new window) IEEE International Conference on Automation Science and Engineering (CASE 2021), Lyon, France, August 23–27, 2021, pp. 551–556.
[P4] Cheema, A., Janabi-Sharifi, F., and Taghipour, A., (PDF file) “Apparatus and System for Changing Mitral Valve Annulus Geometry,” (external link, opens in new window) US Provisional Patent Application no. 62/557,349, Sep 12, 2017; PCT Patent Application No. PCT/CA2018/05116, Published under NO. WO 2019/051587, Sep. 11, 2018, Published under NO. US 2020/0268511 A1, Aug. 27, 2020.
[P3] Janabi-Sharifi, F., Cheema, A., and Taghipour, A. (PDF file) “Temperature Invariant Force and Torque Sensor Assemblies,” (external link, opens in new window) Granted and Issued, US 10,564,057 B2, Feb. 2020.
[P2] Cheema, A., Janabi-Sharifi, F., and Rajaaei, SM. (PDF file) “Transcatheter Heart Valve for Calcific Mitral Stenosis,” (external link, opens in new window) US patent application no. 16/486,625, Jan. 2020.
[J89] Samadikhoshko, Z., Ghorbani, S., Janabi-Sharifi, F., “Modeling and control of aerial continuum manipulation systems: A flying continuum robot paradigm,” (external link, opens in new window) IEEE Access, vol. 8, pp. 176883-176894, Sep. 2020.
[J88] Norouzi Ghazbi, S., and Janabi-Sharifi, F., “Dynamic modeling and system identification of internally-actuated small-size continuum robots,” (external link, opens in new window) Mechanism and Machine Theory, vol. 154, p. 104043, Dec. 2020.
[J87] Goharimanesh, M., Mehrkish, A., and Janabi-Sharifi, F., “A fuzzy reinforcement learning approach for continuum robot control,” (external link, opens in new window) Journal of Intelligent and Robotic Systems, vol. 100, no. 3, pp. 809-826, Dec. 2020.
[J86] Samadikhoshko, Z., Ghorbani, S., Janabi-Sharifi, F., and Zareinia, K., “Nonlinear control of aerial manipulation systems,” (external link, opens in new window) Aerospace Science and Technology, vol. 104, p. 105945, Sep. 2020.
[J85] Keenan, P., Janabi-Sharifi, F., and Assa, A., “Vision-based robotic traversal of textureless smooth surfaces,” (external link, opens in new window) IEEE Trans. Robot, vol. 36, no. 4, pp. 1287–1306, August 2020.
[J84] Taghipour, A., Cheema, A.N., Gu, X., and Janabi-Sharifi, F., “Temperature independent tri-axial force and torque sensor for minimally invasive interventions,” (external link, opens in new window) accepted in IEEE/ASME Trans. Mechatronics, vol. 25, no. 1, pp. 449–459, Feb. 2020.
[C151] Hedayatpour, M., Mehrandezh, M., and Janabi-Sharifi, F., “Optimal-power configurations for hover solutions in mon-spinners,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS 2020, Las Vegas, NV, Oct. 2020, pp. 1344–1349.
[C150] Azimirad, V., Valizadeh Sotubadi, S., and Janabi-Sharifi, F., “Optimizing the parameters of spiking neural networks for mobile robot implementation,” (external link, opens in new window) Proc. Int. Conf. Computer and Knowledge Engineering (ICCKE 2020), Mashhad, Iran, Oct. 29-30, 2020, pp. 30–34.
[C149] Abdulhafiz, I., Janabi-Sharifi, F., and Zareinia, K., “Vision-based manipulation scheme for robotic (prosthetic) hands,” (poster paper), IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2020), Boston, MA, July 6-9, 2020.
[C148] Ramezanlou, M.T., Azimirad, V., Sotubadi, S.V. and Janabi-Sharifi, F., "Spiking Neural Controller for Autonomous Robot Navigation in Dynamic Environments," (external link, opens in new window) Proc. Int. Conf. Computer and Knowledge Engineering (ICCKE 2020), Mashhad, Iran, Oct. 29-30, 2020, pp. 544-548.
[C147] Fallah, M.M.H., Norouzi-Ghazbi, S., Mehrkish, A., and Janabi-Sharifi, F., “Depth-based visual predictive control of tendon-driven continuum robots,” (external link, opens in new window) Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2020), Boston, MA, July 6-9, 2020, pp. 488-494.
[C146] Fallah, M. M. H., and Janabi-Sharifi, F., (PDF file) “Linear position-based visual predictive control,” (external link, opens in new window) Proc. CSME International Congress 2020: Symposium on Mechatronics, Robotics, Control, and Automation, Charlottetown, Prince Edward Island, Canada, June 21-24, 2020.
[C145] Samadikhoshko, Z., Ghorbani, S., and Janabi-Sharifi, F., (PDF file) “Modeling and nonlinear optimal control of N-rotor VTOL unmanned aerial vehicles,” (external link, opens in new window) Proc. CSME International Congress 2020: Symposium on Mechatronics, Robotics, Control, and Automation, Charlottetown, Prince Edward Island, Canada, June 21-24, 2020.
[C144] Norouzi-Ghazbi, S., Mehrkish, A., and Janabi-Sharifi, F., (PDF file) “Jacobian formulation for two classes of cooperative continuum robots,” (external link, opens in new window) Proc. CSME International Congress 2020: Symposium on Mechatronics, Robotics, Control, and Automation, Charlottetown, Prince Edward Island, Canada, June 21-24, 2020.
[B7] Janabi-Sharifi, F., and Melek, W. (Eds), Advances in Motion Sensing and Control for Robotic Applications, Springer, Cham, June 2019.
[BC9] Hedayatpour, M., Mehrandezh, M., and Janabi-Sharifi, F., “Propeller performance in presence of freestream: Applications in modeling multirotor UAVs,” Chapter in Advances in Motion Sensing and Control for Robotic Applications, Janabi-Sharifi, F., and Melek, W. (Eds), pp. 45-60, Springer, Cham, June 2019.
[J83] Bonyan Khamseh, H., Ghorbani, S., and Janabi-Sharifi, F., “Unscented Kalman filter state estimation for manipulating unmanned aerial vehicles,” (external link, opens in new window) Aerospace Science and Technology, vol. 92, pp. 446–463, 2019.
[J82] Shahid, L., Janabi-Sharifi, F., and Keenan, P., “A hybrid method for vision-based surface coverage measurement,” (external link, opens in new window) Robotics and Computer-Integrated Manufacturing, vol. 157, pp. 138–145, June 2019
[J81] Rehman Khan, A.U., Janabi Sharifi, F., Ghahramani, M., Rehman Khan, M.A., (PDF file) “Comparison of reducing the speckle noise in Ultrasound medical images using discrete wavelet transform,” (external link, opens in new window) International Journal of Advanced Computer Science and Applications (IJACSA), vol. 10, no. 5, May 2019.
[J80] Assa, A., Janabi-Sharifi, F., and Plataniotis, K., “Sample-based adaptive Kalman filtering for accurate camera pose tracking,” (external link, opens in new window) Neurocomputing, vol. 333, pp. 307-318, March 2019
[J79] Shahid, L., and Janabi-Sharifi, F., “A neural network based method for coverage measurement of shot-peened panels,” (external link, opens in new window) Neural Computing and Applications, vol. 31, pp. 4829–4836, 2019.
[C143] Rahimzadeh, N., Hasanzadeh, R.P.R., Ghahramani, M., and Janabi-Sharifi, F., “A neutrosophic based non-local means filter for despeckling of ultrasound images,” (external link, opens in new window) Proc. 9th Int. Conf. Comp. Know. Eng, Mashhad, Iran, Oct. 2019.
[C142] Hedayatpour, M, Mehrandezh, M., and Janabi-Sharifi, F., “Precision modeling and optimally-safe design of quadcopters for controlled crash landing in case of rotor failure,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. Robot. Sys (IROS) 2019, Maccau, P.R. China, Oct. 2019, pp. 5206-5211.
[C141] Samadikhoshko, Z., Afshari, M., Zareinia, K., and Janabi-Sharifi, F., “A brief review on robotic grippers classifications,” (external link, opens in new window) Proc. IEEE Canadian Conf. Electrical and Computer Eng., Edmonton, Alberta, Canada, May 2019, pp. 1-4.
[P1] Vakanski, A., and Janabi-Sharifi, F., (PDF file) “Image-based Trajectory Robot Programming Planning Approach,” (external link, opens in new window) Granted and Issued, US 10/112,303 B2, Oct. 30, 2018.
[J78] Bonyan Khamseh, H., Janabi-Sharifi, F., and Abdessamued, A. “Aerial Manipulation- A literature survey,” (external link, opens in new window) Robotics and Autonomous Systems, vol. 107, pp. 221–235, Sep 2018.
[J77] Afram, A., Fung, A.S., Janabi-Sharifi1, F., and Raahemifar, K., “Development of an accurate grey-box model of ubiquitous residential HVAC system for precise performance prediction during summer and winter seasons,” (external link) Energy and Buildings, vol. 171, pp. 168–182, July 2018.
[J76] Afram, A., Fung, A.S., Janabi-Sharifi1, F., and Raahemifar, K., “Development and performance comparison of low-order black-box models for residential HVAC systems,” (external link, opens in new window) Journal of Building Engineering, vol. 15, pp. 137–155, Jan 2018.
[J75] Lotfavar, A., Hasanzadeh, S., and Janabi-Sharifi, F., “Cooperative continuum robots: concept, modeling, and performance analysis,” (external link, opens in new window) IEEE Robotics and Automation Letters, vol. 3, no. 1, pp. 426–433, Jan 2018.
[C140] Ghahramani, M., Vakanski, A., and Janabi-Sharifi, F., “6D object pose estimation for robot programming by demonstration,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Tech (ISOT 2018), Nov. 2018, Cancun, Mexico.
[C139] Assa, A., and Janabi-Sharifi F., “Adaptive 3D object pose estimation through particle swarm optimization,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Tech (ISOT 2018), Cancun, Mexico, Nov. 2018.
[C138] Sajjadi, S., Mehrandezh, M., and Janabi-Sharifi, F., “A nonlinear adaptive model-predictive approach for visual servoing of unmanned aerial vehicles,” (external link) Proc. Int. Symp. Optomechatronic Tech (ISOT 2018), Cancun, Mexico, Nov. 2018.
[C137] Hedayatpour, M, Mehrandezh, M., and Janabi-Sharifi, F., (PDF file) “Propeller performance in presence of freestream,” (external link, opens in new window) Proc. CSME International Congress 2018, Toronto, ON, May 2018.
[I1] Hedayatpour, M., Mehrandezh, M. and Janabi-Sharifi, F., "Path Planning and Controlled Crash Landing of a Quadcopter in case of a Rotor Failure," arXiv preprint arXiv:1809.09334 (external link, opens in new window) , 2018.
[C136] Hedayatpour, M., Mehrandezh, M., and Janabi-Sharifi, F., “Design and development of an agile single-engine holonomic multicopter UAV,” (external link, opens in new window) in Proc. 2018 Atmospheric Flight Mechanics Conf., 2018 AIAA Aviation and Aeronautics Forum and Exposition, Atlanta, GA, June 2018.
[B6] Vakanski, A., and Janabi-Sharifi, F., Robot Learning by Visual Observation (external link, opens in new window) , John Wiley & Sons Inc., Hoboken, NJ, 2017.
[J74] Vakanski, A., Mantegh, I., Janabi-Sharifi, F., “An image-based trajectory planning approach for robust robot programming by demonstration,” (external link, opens in new window) Robotics and Autonomous Systems, vol. 98, pp. 241–257, Dec 2017.
[J73] Jabbari-Asl, H., Babaiasl, M., and Janabi-Sharifi, F., “Adaptive neural network control of cable-driven parallel robots with input saturation,” (external link, opens in new window) Engineering Applications of Artificial Intelligence, vol. 65, pp. 252–260, Oct. 2017.
[J72] Afram, A., Janabi-Sharifi, F., “Supervisory model predictive controller (MPC) for residential HVAC system: Implementation and experimentation on TRCA-ASH,” (external link, opens in new window) Energy and Buildings, vol. 154C, pp. 268–282, Sep 2017.
[J71] Bonyan Khamseh, H., and Janabi-Sharifi, F., “UKF-based LQR control of a manipulating unmanned aerial vehicle,” (external link, opens in new window) Unmanned Systems, vol. 5, no. 3, pp. 131–139, July 2017.
[J70] Shahid, L., Janabi-Sharifi, F., and Keenan, P., “Image segmentation techniques for real-time coverage measurement in shot peening processes,” (external link, opens in new window) Int. J. Advanced Manufacturing Technology, vol. 91, no. 1, pp. 859-867, July 2017.
[J69] Hassanzadeh, S., Janabi-Sharifi, F., and Keenan, P., “Backlash characterization and position control of a robotic catheter using experimentally-based kinematic model,” (external link, opens in new window) Mechatronics, vol. 44, pp. 94–106, June 2017.
[J68] Afram, A., Janabi-Sharifi1, F., Fung, A.S., and Raahemifar, K., “Artificial neural network (ANN) based model predictive control (MPC) and optimization of HVAC systems: A state of the art review and case study of a residential HVAC system,” (external link, opens in new window) Energy and Buildings, vol. 14, pp. 96-113, April 2017.
[J67] Kouh Soltani, M., Khanmohammadi, S., Ghalichi, F., and Janabi-Sharifi, F., “A soft robotics nonlinear position/force control of a tendon driven catheters,” (external link, opens in new window) Int. J. Control Autom Syst (IJCAS), vol. 15, no. 1, pp. 54–63, Feb. 2017.
[C135] Hedayatpour, M., Mehrandezh, M. and Janabi-Sharifi, F., “A unified approach to configuration-based dynamic analysis of quadcopters for optimal stability,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. Robot. Sys (IROS) 2017, Vancouver, BC, Sep 2017.
[C134] Hedayatpour, M., Mehrandezh, M., and Janabi-Sharifi, F., (PDF file) “Revised propeller dynamics and energy-optimal hovering in a monospinner,” (external link, opens in new window) Proc. 4th Int. Conf. Control, Dynamic Systems, and Robotics (CDSR'17), Toronto, Canada, August 2017, pp 135-1–135-8.
[BC8] Zdero, R., MacAvelia, T., and Janabi-Sharifi, F., “Measuring force and torque for surgical drilling into bone,” Chapter in Experimental Methods for Orthopedic Biomechanics: A Step-by-Step Practical Manual, Zdero, R. (Ed.), Elsevier Publishing: New York, NY, 2016.
[J66] Afram, A., Janabi-Sharifi, F., “Effects of dead-band and set-point settings of on/off controllers on the energy consumption and equipment switching frequency of a residential HVAC system,” (external link, opens in new window) Journal of Process Control, vol. 47, pp. 161–174, Oct. 2016.
[J65] Hassanzadeh, S., and Janabi-Sharifi, F., “Model-based force estimation for intra-cardiac catheters,” (external link, opens in new window) IEEE/ASME Trans. Mechatronics, vol. 21, no. 1, pp. 154–162, Feb. 2016.
[C133] Taghipour, A., and Janabi-Sharifi, F., “Temperature independent force/torque sensor for cardiac ablation catheters,” Proc. Int. Symp. Optomechatronic Technologies: ISOT 2016, Nov. 2016, Tokyo, Japan.
[C132] Bonyan Khamseh, H., and Janabi-Sharifi, F., “Modeling and control of a manipulating unmanned aerial vehicle,” Proc. CSME International Congress 2016, Kelowna, BC, June 2016.
[J64] Atisam Farooq, A., Afram, A., Schulz, N., and Janabi-Sharifi, F., “Gray-box modeling of a low pressure electric boiler for domestic hot water system,” (external link, opens in new window) Applied Thermal Engineering, vol. 84, pp. 257–267, June 2015.
[J63] Assa, A., and Janabi-Sharifi, F., “A Kalman filter-based framework for enhanced sensor fusion,” (external link, opens in new window) IEEE Sensors J., vol. 15, no. 6, pp. 3281–3292, June 2015.
[J62] Afram, A., Janabi-Sharifi, F., “Black-box modeling of residential HVAC system and comparison of grey-box and black-box modeling methods,” (external link, opens in new window) Energy and Buildings, vol. 94, pp. 121–149, May 2015.
[J61] Assa, A., and Janabi-Sharifi, F., “Virtual visual servoing for multi-camera pose estimation,” (external link, opens in new window) IEEE/ASME Trans. Mechatronics, vol. 20, no. 2, April 2015, pp. 789-798.
[J60] Abdessameud, A., and Janabi-Sharifi, F., “Image-based tracking control of VTOL unmanned aerial vehicles,” (external link, opens in new window) Automatica, vol. 53, pp. 111–119, Mar. 2015.
[J59] Rahimi, F., Bee, C., Wang, D., Janabi-Sharifi, F., and Almeida, Q., “Subgroup analysis of PD tremor with loading: Action tremor as a combination of classical rest and physiological tremor,” (external link, opens in new window) Clinical Biomechanics, vol. 30, no. 2, Feb. 2015, pp. 114–120.
[J58] Afram, A., and Janabi-Sharifi, F., “Gray-box modeling and validation of residential HVAC system for control system design,” (external link, opens in new window) Applied Energy, vol. 137, pp. 134–150, Jan 2015.
[J57] Ebrahimi, A., Janabi-Sharifi, F., and Ghanbari, A., “UavisBug: mini UAV vision-based 3D motion planning and obstacle avoidance in an unknown indoor environment,” (external link, opens in new window) Canadian Aeronautics and Space Journal, vol. 60, no. 1, pp. 9–21, Oct. 2014.
[J56] Afram, A., and Janabi-Sharifi, F., “Review of modeling methods for HVAC systems,” (external link, opens in new window) Applied Thermal Engineering, vol. 67, issues 1-2, pp. 507–519, June 2014.
[J55] Hassanzadeh, S., and Janabi-Sharifi, F., “An efficient static analysis of continuum robots,” (external link, opens in new window) Journal of Mechanisms and Robotics, vol. 6, no. 3, 2014.
[J54] Vakanski, A., Janabi-Sharifi, F., and Mantegh, I., (PDF file) “Robotic learning of manipulation tasks from visual perception using a Kinect sensor,” (external link, opens in new window) Int. J. Machine Learning and Computing, vol. 4, no. 2, Apr. 2014, pp. 163–169.
[J53] Afram, A., and Janabi-Sharifi, F., “Theory and applications of HVAC control systems – A review of Model Predictive Control (MPC),” (external link, opens in new window) Building and Environment, vol. 72, Feb. 2014, pp. 343–355.
[J52] Assa, A., and Janabi-Sharifi, F., “A robust vision-based sensor fusion approach for real-time pose estimation,” (external link, opens in new window) IEEE Trans. Cybernetics, vol. 44, no. 2, pp. 217–227, Feb. 2014.
[J51] MacAvelia, T., Ghasempoor, A., and Janabi-Sharifi, F., “Force and torque modeling of drilling simulation for orthopedic surgery,” (external link, opens in new window) Computer Methods in Biomechanics and Biomedical Eng., vol. 17, no. 12, pp. 1285–1294, 2014.
[C131] Taghipour, A., and Janabi-Sharifi, F., “Highly sensitive LPFG-based bending sensor in W-type optical fiber,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2014, Seattle, WA, Oct. 2014, pp. 280–282.
[C130] Assa, A., and Janabi-Sharifi, F., “Novel two-stage control scheme for robust constrained visual servoing,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. Intel. Robot. Sys.: IROS 2014, Chicago, IL, Sep. 2014, pp. 749–754.
[C129] Assa, A., and Janabi-Sharifi, F., “Robust model predictive control for visual servoing,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. Intel. Robot. Sys.: IROS 2014, Chicago, IL, Sep. 2014, pp. 2715–2720.
[C128] Afram, A., Janabi-Sharifi, F., Fung, A., and Fernando, X., (PDF file) “Grey-box modeling of a residential multi-zone air handling unit (AHU) through comprehensive monitoring,” (external link, opens in new window) Proc. Int. Conf. Smart Grid Engineering (SEGE2014), Oshawa, Ontario, Aug. 2014, (Conference Best Regular Paper Award).
[C127] Assa, A., and Janabi-Sharifi, F., “Hybrid predictive control for constrained visual servoing,” (external link, opens in new window) Proc. IEEE/ASME Adv. Intel. Mechatronics: AIM2014, Besançon, France, July 2014, pp. 931–936.
[C126] Assa, A., and Janabi-Sharifi, F., “Position-based predictive controller for constrained visual servoing,” Proc. CSME International Congress, Toronto, Canada, June 2014.
[C125] Hassanzadeh, S., and Janabi-Sharifi, F., “An efficient static model for steerable catheters,” (external link, opens in new window) Proc. 2014 IEEE Canadian Conf. Elec. Comp. Eng.: CCECE2014, Toronto, Canada, May 2014, pp. 863–868.
[C124] Afram, A., Janabi-Sharifi, F., and Giorgio, G., “Data-driven modeling of thermal storage tank,” (external link, opens in new window) Proc. 2014 IEEE Canadian Conf. Elec. Comp. Eng.: CCECE2014, Toronto, Canada, May 2014, pp. 551–555.
[C123] Assa, A., and Janabi-Sharifi, F., “Two DOF controller for decoupled image-based visual servoing,” (external link, opens in new window) Proc. 2014 IEEE Canadian Conf. Elec. Comp. Eng.: CCECE2014, Toronto, Canada, May 2014. Winner of the third prize in student paper competition in IEEE CCECE2014, pp. 819–824.
[C122] Vakanski, A., Janabi-Sharifi, F., and Mantegh, I., (PDF file) “Robotic learning of manipulation tasks from visual perception using a Kinect sensor,” (external link, opens in new window) Int. Conf. Machine Learning and Computing 2014, Toronto, Canada, Jan. 2014.
[BC7] Almeida, Q.J., Rahimi, F., Wang, D., and Janabi-Sharifi, F., “Dopaminergic influences on rest and action tremors and emerging therapies for tremor,” (external link, opens in new window) Chapter in Mechanisms and Emerging Therapies of Tremor Disorders, Grimaldi, G., and Manto, M. (Eds.), 2013, Springer: New York, pp. 463-476.
[C121] Abdessameud, A., and Janabi-Sharifi, F., “Dynamic image-based tracking control of VTOL UAVs,” (external link, opens in new window) Proc. IEEE Conf. Decision and Control, Florence, Italy, Dec. 2013, pp. 7666–7671.
[C120] Latif, S., Fernando, X., and Janabi-Sharifi, F., “A greener MAC layer protocol for smart home wireless sensor networks,” (external link, opens in new window) In IEEE Online Conference on Green Communications (OnlineGreenComm), Piscataway, New Jersey, USA, October 2013, pp. 169‒174.
[C119] Assa, A., and Janabi-Sharifi, F., “Decentralized multi-camera fusion for robust and accurate pose estimation,” (external link, opens in new window) Proc. IEEE/ASME Int. Conf. Adv. Intelligent Mechatronics: AIM2013, Wollongong, Australia, July 2013, pp. 1696‒1701.
[C118] Assa, A., and Janabi-Sharifi, F., “Closed-loop uncertainty modeling for visual servoing,” (external link, opens in new window) Proc. IEEE Int. Conf. Rob. Automat.: ICRA 2013, Karlsruhe, Germany, May 2013, pp. 3089‒3094.
[J50] Macavelia, T., Salahi, M., Olsen, M., Crookshank, M., Schemitsch, E.H., Ghasempoor, A., Janabi-Sharifi, F., and Zdero, R., “Biomechanical measurements of surgical drilling force and torque in human versus artificial femurs,” (external link, opens in new window) Journal of Biomechanical Eng., vol. 134, no. 12, Dec. 2012, 124503-1–9.
[J49] Vakanski, A., Mantegh, I., Irish, A., and Janabi-Sharifi, F., “Trajectory learning for robot programming by demonstration using hidden Markov model and dynamic time warping,” (external link, opens in new window) IEEE Trans. Sys. Man, Cybern.: Part B, vol. 41, no. 4, Aug. 2012, pp. 1039 – 1052.
[J48] Nematollahi, E., Vakanski, A., and Janabi-Sharifi, F., “A second-order conic optimization model for visual servoing,” (external link, opens in new window) Mechatronics, vol. 22, no. 4, June 2012, pp. 444 – 467.
[J47] Huang, Y.H., Hung, S.Y., Janabi-Sharifi, F., Wang, W., and Y. S. Liu, “Quantitative phase retrieval in dynamic laser speckle interferometry,” (external link, opens in new window) Optics and Lasers in Engineering, vol. 50, no. 4, Apr. 2012, pp. 534–539.
[C117] Rostami, A., Taghipour, A., Bahrami, M., Baghban, H., Rasooli, H., Dolatyari, M., Janabi-Sharifi, F., and Gu, X., “Grating-based fiber bending sensors with wide bending range,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2012, Oct. 2012, Paris, France.
[C116] Vakanski, A., Janabi-Sharifi, F., and Mantegh, I., “Transferring skills to robots for tasks with cyclic motions via dynamical systems approach,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2012, Oct. 2012, Paris, France.
[C115] Assa, A., and Janabi-Sharifi, F., “A pre-processing data fusion scheme with applications to multi-camera pose estimation,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2012, Oct. 2012, Paris, France.
[J46] Ganji, Y., Janabi-Sharifi, F., and Cheema, A., “Remote controlled robot assisted cardiac navigation: feasibility assessment and validation in a porcine model,” (external link, opens in new window) Int. J. Medical Robotics and Comp. Assisted Surgery, vol. 7, no. 4, Dec. 2011, pp. 489–495.
[J45] Janabi-Sharifi, F., Deng, L., and Wilson, W.J., “Comparison of basic visual servoing methods,” (external link, opens in new window) ASME/IEEE Trans. Mechatronics, vol. 16, no. 5, Oct. 2011, pp. 967–983.
[J44] Rostami, A., Matloub, S., and Janabi-Sharifi, F., “Analysis of one-diomnsional Fibonacci-class quasicrystals using perturbation theory,” (external link, opens in new window) Optik, vol. 122, issue: 13, Jul. 2011, pp. 1136–1139.
[J43] Janabi-Sharifi, F., and Hassanzadeh, I., “Experimental analysis of mobile-robot teleoperation via shared impedance control,” (external link, opens in new window) IEEE Trans. Sys. Man, and Cybern.: Part B, vol. 41, no. 2, April 2011, pp. 591–606.
[J42] Janabi-Sharifi, F., and Vakanski, A., “Analysis of visual acuity and motion resolvability as measures for optimal visual perception of the workspace,” (external link, opens in new window) Appl. Ergo., vol. 42, no. 3, Mar. 2011, pp. 473–486.
[J41] Huang, Y. H., Fu, Y., Liu, Y. S., Hung, S. Y., Li, C. G., and Janabi-Sharifi, F., “Dynamic phase evaluation in sparse-sampled temporal speckle pattern sequence,” (external link, opens in new window) Optics Letters, vol. 36, no. 4, Feb. 2011, pp. 526–528.
[J40] Huang, Y., Janabi-Sharifi, F., Liu, Y., and Hung, Y.Y., “Dynamic phase measurement in shearography by clustering method and Fourier filtering,” (external link, opens in new window) Optics Express, vol. 19, no. 2, Jan. 2011, pp. 606–615.
[J39] Fakhrabadi, M.M.S, Ghanbari, A., Rostami, A., and Janabi-Sharifi, F., “Analysis of a micro-optomechatronic force sensor,” (external link, opens in new window) Fiber and Integrated Optics, vol. 29, no. 6, Nov. 2010, pp. 491–513.
[J38] Janabi-Sharifi, F., and Marey, M., “A Kalman filter based pose estimation in visual servoing,” (external link, opens in new window) IEEE Trans. Robotics, vol. 26, no. 5, Sep. 2010, pp. 939–947.
[J37] Kim, J., Janabi-Sharifi, F., and Kim, J., “A haptic interaction method using visual information and physically-based modeling,” (external link, opens in new window) IEEE/ASME Trans. Mechatronics, vol. 15, no. 4, August 2010, pp. 635–645.
[J36] Tao, X., Cho, H., and Janabi-Sharifi, F., “Optical design of a variable view imaging system with the combination of a telecentric scanner and double wedge prisms,” (external link, opens in new window) Applied Optics, vol. 49, no. 2, Jan. 2010, pp. 239–246.
[J35] Hosseini-Sunny, K., Momeni, H., and Janabi-Sharifi, F., “A modified adaptive controller design for teleoperation systems,” (external link, opens in new window) Robotics and Autonomous Systems, vol. 58, no. 5, May 2010, pp. 676–683.
[J34] Sharifi Sedeh, R., Ahmadian, M.T., and Janabi-Sharifi, F., “Modeling, simulation, and optimal initiation planning for needle insertion into liver,” (external link, opens in new window) Journal of Biomechanical Engineering, vol. 132, no. 4, April 2010, pp. 041001-1−041001-11.
[J33] Hosseini-Sunny, K., Momeni, H., and Janabi-Sharifi, F., “Model reference adaptive control design for teleoperation system with output prediction,” (external link, opens in new window) Journal of Intelligent and Robotic Systems, vol. 59, no. 3-4, Feb. 2010, pp. 319–339.
[J32] Cheema, A.N., Ganji, Y., and Janabi-Sharifi, F., “Development of a remote controlled robotic system for facilitating trans septal puncture,” Canadian J. Cardiology, vol. 26, p. 115D.
[C114] Vakanski, A., Janabi-Sharifi, F., Mantegh, I., and Irish, A., (PDF file) “Trajectory learning based on conditional random fields for robot programming by demonstrations,” (opens in new window) in Proc. IASTED Int. Conf. Robotics and Applications, Cambridge, MA, Nov. 2010, pp. 401–408.
[C113] Rostami, A., Ahmadi, P.N., and Janabi-Sharifi, F., “Finite difference modeling of bipolar OLED,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Toronto, Canada, Oct. 2010, DOI: 10.1109/ISOT.2010.5687373.
[C112] Rostami, A. Baghban, H., Khalafi, A., Rasooli, H., Ghanbari, A., and Janabi-Sharifi, F., “All-optical switching using microring resonators including Quantum-Dots,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Toronto, Canada, Oct. 2010, DOI: 10.1109/ISOT.2010.5687367.
[C111] Rostami, A., Rasooli, H., Ghanbari, A., Zabihi, S., and Janabi-Sharifi, F., “Quantum-wire conductance manipulating by asymmetric quantum dot-molecules,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Toronto, Canada, Oct. 2010, DOI: 10.1109/ISOT.2010.5687365.
[C110] Rostami, A., Rasooli, H., Andalibi, S., and Janabi-Sharifi, F., “Performance enhancement of organic solar cells using plasmonic effects,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Toronto, Canada, Oct. 2010, DOI: 10.1109/ISOT.2010.5687372.
[C109] Rostami, A., Makouei, S., and Janabi-Sharifi, F., “Zero-dispersion wavelength and mode field diameter managements of ZDSF by optimization technique,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Toronto, Canada, Oct. 2010, DOI: 10.1109/ISOT.2010.5687374.
[C108] Rostami, A., Sattari, H., and Janabi-Sharifi, F., “Proposal for 1×4 ultracompact arrayed waveguide grating based on Si-nanowire spirals,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Oct 2010, Toronto, Canada, DOI: 10.1109/ISOT.2010.5687371.
[C107] Rostami, A., Ghanbari, A., Soofi, H., and Janabi-Sharifi, F., “Enlarging effective mode area of photonic crystal fibers using defected core structures,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Oct 2010, Toronto, Canada, DOI: 10.1109/ISOT.2010.5687370.
[C106] Rostami, A., Makouei, S., and Janabi-Sharifi, F., “Design and temperature analysis of ZDSF based on triangular graded-index single-mode optical fiber,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Oct 2010, Toronto, Canada, DOI: 10.1109/ISOT.2010.5687368.
[C105] Goli, M., Ghanbari, A., and Janabi-Sharifi, F., “Adaptive particle filter based pose estimation using a monocular camera,” (external link, opens in new window) in Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Toronto, Canada, Oct. 2010, DOI: 10.1109/ISOT.2010.5687313.
[C104] Assa, A., Janabi-Sharifi, F., Moshiri, B., and Mantegh, I., “A data fusion approach for multi-camera based visual servoing,” (external link, opens in new window) in Proc. Int. Symp. Optomechatronic Technologies: ISOT 2010, Toronto, Canada, Oct. 2010, DOI: 10.1109/ISOT.2010.5687312.
[C103] Irish, A., Mantegh, I., and Janabi-Sharifi, F., “A PbD approach for learning pseudo-periodic robot trajectories over curved surfaces,” (external link, opens in new window) Proc. IEEE/ASME Int. Conf. Adv. Intel. Mechatronics,: AIM 2010, Montréal, Canada, July 2010, pp. 1425–1432 .
[J31] Nematollahi, E., and Janabi-Sharifi, F., “Generalization to control laws of image-based visual servoing,” (external link, opens in new window) Int. J. Optomechatronics, vol. 3, no. 3, Jul. 2009, pp. 167–186.
[J30] Janabi-Sharifi, F., and Jorjani, G., “An adaptive neuro-fuzzy system for modeling and simulation of control systems in electrical arc furnaces,” (external link, opens in new window) Control Engineering Practice, vol. 17, no. 10, Oct. 2009, pp. 1202–1219.
[J29] Ganji, Y., Janabi-Sharifi, F., and Cheema, A. “Robot-assisted catheter manipulation for intracardiac navigation,” (external link, opens in new window) Int. J. Comp. Assisted Radiology and Surgery, vol. 4, no. 4, June 2009, pp. 307–315.
[J28] Tao, X., Janabi-Sharifi, F., and Cho, H., “An active zooming strategy for variable field of view and depth of field in vision-based microassembly” (external link, opens in new window) IEEE Trans. Automation Sci. and Eng., vol. 6, no. 3, July 2009, pp. 504–513.
[J27] Ganji, Y., and Janabi-Sharifi, F., “Catheter kinematics for intracardiac navigation,” (external link, opens in new window) IEEE Trans. Biomedical Engineering, vol. 56, no. 3, March 2009, pp. 621–632.
[J26] Li, G., and Janabi-Sharifi, F., “Fuzzy looperless tension control for hot strip rolling,” (external link, opens in new window) Fuzzy Sets and Systems, vol. 160, no. 4, Feb. 2009, pp. 521–536.
[C102] Rostami, A., Matloub, S., and Janabi-Sharifi, F., “Analysis of one-dimensional Fibonacci-class quasicrystals using perturbation theory,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2009), Istanbul, Turkey, Sep. 2009, pp. 241–244.
[C101] Rostami, A., Abbasian, K., Khodashenas, P.S., Janabi-Sharifi, F., “Proposal for tunable optical delay line using nanophotonic tools,” Proc. Int. Symp. Optomechatronic Technologies (ISOT 2009), Istanbul, Turkey, Sep. 2009, pp. 245–249.
[C100] Rostami, A., Zirak Gharamaleki, S., Alipour Banaei, H., Haddadpour, A., and Janabi-Sharifi, F., “Multi channel narrowband DWDM optical filters based on generalized aperiodic Thue-Morse structures,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2009), Istanbul, Turkey, Sep. 2009, pp. 250–255.
[C99] Rostami, A., Andalib, A., Granpayeh, N., and Janabi-Sharifi, F., “The Shannon channel capacity of optimum dispersion compensated nonlinear optical fibers,” Int. Symp. Optomechatronic Technologies (ISOT 2009), Istanbul, Turkey, Sep. 2009, pp. 311–315.
[C98] Ghanbari, A., Rostami, A., Fakhrabadi, M.M., and Janabi-Sharifi, “Prediction of the behavior of a microcantilever based optomechatronic force sensor by finite element method,” (external link, opens in new window) Int. Symp. Optomechatronic Technologies (ISOT 2009), Istanbul, Turkey, Sep. 2009, pp. 334-339.
[C97] Rahimi, F., Wang, D., Almeida, Q.J., Janabi-Sharifi, F., “Isometric torque generation in a Parkinsonian tremulous elbow and the effect of medication,” (external link, opens in new window) in Proc. 2009 IEEE Int. Conf. on Science and Technology for Humanity, Toronto, Canada, Sep. 2009, pp. 285–289.
[C96] Rahimi, F., Almeida, Q., Janabi-Sharifi, F., and Wang, D., “Tremor suppression orthoses for Parkinson's patients: A frequency range perspective,” (external link, opens in new window) Proc. 31st Annual Int. Conf. IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, Sep. 2009, pp. 1565-1568.
[C95] Rahimi, F., Callaghan, J., Janabi-Sharifi, F., and Wang, D., “EMG-biofeedback and load sharing problem in assistive and rehabilitation orthotic devices,” (external link, opens in new window) Proc. 31st Annual Int. Conf. IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, Sep. 2009, pp. 3000–3003.
[B5] Otani, Y., Bellouard, Y., Wen, J.T.-Y., Hodko, D., Katagiri, Y., Kassegne, S.K., Kofman, Kaneko, S., Perez, C.A., Coquin, D., Kaynak, O., Cho, Y., Fukuda, T., Yi, J., and Janabi-Sharifi, F., (Editors), Proceeding of SPIE: Optomechatronic Technologies 2008, vol. 7266, Bellingham, Washington, USA, Nov. 2008.
[BC6] Kim, J., Janabi-Sharifi, F., and Kim, J., “Haptic feedback based on physically based modeling for cellular manipulation systems,” (external link, opens in new window) Chapter in Haptics: Perception, Devices and Scenarios, Lecture Notes in Computer Science, vol. 5024, Ed. M. Ferre, Springer: Berlin/Heidelberg, 2008, also (Proc. European Haptics Conference: EuroHaptics2008, Madrid, Spain), pp. 661-667.
[J25] Tao, X., Cho, H., and Janabi-Sharifi, F., “Active optical system for variable view imaging of micro objects with emphasis on kinematic analysis,” (external link, opens in new window) Applied Optics, vol. 47, no. 22, 2008, pp. 4121–4132.
[J24] Ziaei-Rad, S., Janabi-Sharifi, F., Danseshpanah, M., Abdollahi, A., Ostadi, H., and Samani, H., (PDF file) “A practical approach to control and self-localization of an omni-directional mobile robot,” (external link, opens in new window) WSEAS Trans. Systems and Control, vol. 3, issue. 3, May 2008, pp. 413–424.
[J23] Masih-Tehrani, B., and Janabi-Sharifi, F., “Kinematic modeling and analysis for human visual perceptibility,” (external link, opens in new window) Int. J. Industrial Ergonomics, vol. 38, no. 1, Jan. 2008, pp. 73–89.
[J22] Rostami, A., Yazdanpanah-Goharrizi, A., and Janabi-Sharifi, F., “Hybridization of neural networks and genetic algorithms for identification of complex Bragg gratings,” (external link, opens in new window) J. Electromagnetic Waves and Applications, vol. 22, no. 5-6, 2008, pp: 643–664.
[C94] Lim, J.G., Janabi-Sharifi, F., and D.-S. Kwon, (PDF file) “Fast and reliable camera-tracked Laser pointer system designed for audience,” (external link, opens in new window) Proc. International Conference on Ubiquitous Robots and Ambient Intelligence (URAI2008), Seoul, Korea, Nov. 2008, pp. 529–534.
[C93] Rostami, A., Yadipour, R., Abbasian, K., Koozehkanani, Z.D., Ghanbari, A., and Janabi-Sharifi, F., “Nanotechnology and high-precision optical displacement sensor design for optomechatronical systems,” (external link, opens in new window) Proc. SPIE Int. Symp. Optomechatronic Technologies (ISOT 2008): Conference on Optomechatronic Sensors and Instrumentation IV, San Diego, CA, Nov. 2008, vol.7266, pp. 72660L-1–13.
[C92] Rostami, A., Zyaei, M., Rasouli Saghai, H., and Janabi-Sharifi, F., “Terahertz asymmetric quantum well infrared photodetector design based on electromagnetically induced transparency,” (external link, opens in new window) Proc. SPIE Int. Symp. Optomechatronic Technologies (ISOT 2008): Conference on Optomechatronic Micro/Nano Devices and Components IV, San Diego, CA, Nov. 2008, vol.7266, pp. 726613-1–10.
[C91] Rostami, A., Alipour Banaei, H., Haddadpour, A., and Janabi-Sharifi., F., “Microwave lens design using two-dimensional 12-folded quasi-photonic crystals,” (external link, opens in new window) Proc. SPIE Int. Symp. Optomechatronic Technologies (ISOT 2008): Conference on Optomechatronic Micro/Nano Devices and Components IV, San Diego, CA, Nov. 2008, vol. 7266, pp. 726617-1–9.
[C90] Rostami, A., Abbasiana, K., Khodashenasa, P.S., and Janabi-Sharifi, F., “All-optical tunable mirror of VCSEL using electromagnetically induced transparency,” (external link, opens in new window) Proc. SPIE Int. Symp. Optomechatronic Technologies (ISOT 2008): Conference on Optomechatronic Micro/Nano Devices and Components IV, San Diego, CA, Nov. 2008, vol.7266, pp. 72660Z-1–9.
[C89] Ghanbari, A., Rostami, A., Haddadpour, A., Alipour Banaei, H., and Janabi-Sharifi, F., “A radio over fiber network architecture for road vehicle communication systems using 2-D photonic quasi-crystals,” (external link, opens in new window) Proc. SPIE Int. Symp. Optomechatronic Technologies (ISOT 2008): Conference on Optomechatronic Systems Control IV, San Diego, CA, Nov. 2008, vol.7266, pp. 72661Q-1–9.
[C88] Hong, D., Janabi-Sharifi, F., and Cho, H., “An adaptive depth of field imaging system for visual servoing,” (external link, opens in new window) Int. Fed. Auto. Control Congress: IFAC 2008, Seoul, Korea, July 2008, pp. 5405–5410.
[C87] Masih-Tehrani, B. and Janabi-Sharifi, F., “Kinematic and dynamic measures for posture prediction,” (external link, opens in new window) Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2008), Sep 2008, Nice, France, June 2008, pp. 89–94.
[C86] Kim, J., Janabi-Sharifi, F., and Kim, J., “A physically-based haptic rendering for telemanipulation with visual information: Macro and micro applications,” (external link, opens in new window) Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2008), Sep 2008, Nice, France, June 2008, pp. 3489–3494.
[C85] Ziaei-Rad, S., Janabi-Sharifi, F., Danseshpanah, M., Abdollahi, A., Ostadi, H., and Samani, H., (PDF file) “Control and self-localization of an omni-directional mobile robot,” (external link, opens in new window) Proc. WSEAS 10th Int. Conf. Automatic Control, Modeling, and Simulation, Istanbul, Turkey, May 2008, pp. 370–379.
[C84] Lim, J. G., Sohn, Y.I. Sohn, Janabi-Sharifi, F., and Kwon, D., “Proposal on the enhancement of real-time processing and interaction in a camera-tracked laser pointer system,” Proc. HCI2008, vol. 1, Phoenix Park, Korea, Feb. 2008, pp.332–336.
[B4] Fatikow, S., Janabi-Sharifi, F., Fukuda, T., Cho, H., and Koivo, H.N., (Editors), Optomechatronic Systems Control III, Proceedings of SPIE Vol. 6719, The International Society for Optical Engineering (SPIE), Bellingham, Washington, USA, Oct. 2007.
[J21] Rostami, A., Noshad, M., Hedayati, H., Ghanbari, A., and Janabi-Sharifi, F., “A novel and high-precision optical displacement sensor,” (external link, opens in new window) Int. J. Comp. Sci. and Network Security, vol. 7, no. 4, April 2007, pp. 311–316.
[J20] Janabi-Sharifi, F., Hayward, V., and Wang, Q.Y., “Design and implementation of a haptic-graphic display system,” (external link, opens in new window) Displays, vol. 28, no. 3, July 2007, pp. 118–128.
[J19] Shchokin, B. and Janabi-Sharifi, F., “Design and kinematic analysis of a rotary positioner,” (external link, opens in new window) Robotica, vol. 25, no. 1, Jan 2007, pp. 75–85.
[C83] Rostami, A., Noshad, M., Bayat, M., Hedayati, H., Ghanbari, A., and Janabi-Sharifi, F., “Design and modeling of fiber-optic displacement sensor with sub-nanometric resolution and long range,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2007): Optomechatronic Systems Control III, Lausanne, Switzerland, Oct. 2007, vol. 6719, pp. 67190C-1–67190C-10.
[C82] Rostami, A., Mirshafieyan, S.S., Ghanbari, A., and Janabi Sharifi, F. “A proposal for design of high-resolution and integrated 2-D array of ultrasound detector for imaging purposes based on optical MEMS,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2007): Optomechatronic Systems Control III, Lausanne, Switzerland, Oct. 2007, vol. 6719, pp. 67190F-1–67190F-9.
[C81] Rostami, A., Haghnejad, M. H. A., Koozehkanani, Z. D., and Janabi-Sharifi, F., “Multi-channel optical filter design using superimposed Bragg gratings,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2007): Optomechatronic Sensors and Instrumentation, Lausanne, Switzerland, Oct. 2007, vol. 6716, pp. 67160C-1–67160C-7.
[C80] Rostami, A., Andalib. A., and Janabi-Sharifi, F., “Investigation of Induced XPM crosstalk in presence of optimal dispersion compensation in optical fibers based on the Volterra series,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2007): Optomechatronic Sensors and Instrumentation, Lausanne, Switzerland, Oct. 2007, vol. 6719, pp. 67160L-1–67160L-6.
[C79] Rostami, A., Alipour, H., and Janabi-Sharifi, F., “Analysis of optical waveguides designed with two-dimensional photonic crystals in the presence of defects,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2007): Optomechatronic Sensors and Instrumentation, Lausanne, Switzerland, Oct. 2007, vol. 6716, pp. 67160M-1–67160M-8, DOI: 10.1117/12.754227.
[C78] Rostami, A., A. Salmanogli., and Janabi-Sharifi, F., “Investigation of optical amplification in Si-Nanocrystal-Er doped optical fibers,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2007): Micro/Nano Devices and Components, Lausanne, Switzerland, Oct. 2007, vol. 6717, pp. 67170A-1–67170A-8.
[C77] Rostami, A., H. Rasooli, and Janabi-Sharifi, F., “A proposal for high performance Infrared Photodetectors: Effects of defect on Optical absorption properties in GaN/AlGaN spherical potential,” (external link, opens in new window) Proc. Int. Symp. Optomechatronic Technologies (ISOT 2007): Micro/Nano Devices and Components, Lausanne, Switzerland, Oct. 2007, vol. 6717, pp. 67170B-1–67170B-10.
[C76] Tao, X., Janabi-Sharifi, F., and Cho, H., “An active zooming method for simultaneous control of field-of-view and depth-of-field in vision-based microassembly,” (external link, opens in new window) invited paper, Proc. Int. Symp. Optomechatronic Technologies (ISOT 2007): Optomechatronic Systems Control III, Lausanne, Switzerland, Oct. 2007, vol. 6719, pp. 671904-1–671904-9.
[C75] Ganji, Y., and Janabi-Sharifi, F., “Kinematic characterization of a cardiac ablation catheter,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. Intel. Robot. Sys, IROS 2007, San Diego, CA, Oct. 2007, pp. 1876–1881.
[C74] Ferworn, A., Tran, N., Tran, J., Zarnett, G., Janabi-Sharifi,F., “WiFi repeater deployment for improved communication in confined-space urban disaster search,” Proc. 2007 IEEE International Conference of Systems of Systems (SoSE07), Texas, USA, April 2007, pp. 1–5.
[B3] Otani, Y., and Janabi-Sharifi, F., (Editors), Optomechatronic Systems Actuators, Manipulation, and Control, Proceedings of SPIE, vol. 6374, The International Society for Optical Engineering (SPIE), Bellingham, Washington, USA, Oct. 2006.
[C73] Rostami, G., Rostami, A, and Janabi-Sharifi, F., “Tunable dispersion management using thermo-optical effect in ring resonator,” (external link, opens in new window) Proc. SPIE Optics East 2006- Int. Conf. Optomechatronics Actuators, Manipulation, and Systems Control, SPIE Proc. Vol. 6374, Boston, MA, Oct. 2006, pp. 637411-1–637411-16.
[C72] Rostami, A., Yazdanpanah-Goharrizi, A., Yazdanpanah-Goharrizi, A., and Janabi-Sharifi, F., “Hybrid neural networks and Genetic Algorithms for identification of complex Bragg gratings,” (external link, opens in new window) Proc. SPIE Optics East 2006- Int. Conf. Optomechatronics Actuators, Manipulation, and Systems Control, SPIE Proc. Vol. 6374, Boston, MA, Oct. 2006, pp. 63740W-1–63740W-15.
[C71] Rostami, A., Yazdanpanah-Goharrizi, A., Yazdanpanah-Goharrizi, A., and Janabi-Sharifi, F., “Identification of complex Bragg gratings based on optical transfer function estimation using Genetic Algorithm,” (external link, opens in new window) Proc. SPIE Optics East 2006- Int. Conf. Optomechatronics Actuators, Manipulation, and Systems Control, SPIE Proc. Vol. 6374, Boston, MA, Oct. 2006, pp. 63740X-1–63740X-10.
[C70] Rostami, A., Rasooli, H., and Janabi-Sharifi, F., “Circuit modeling of multiple quantum well laser optimized by carrier tunneling,” (external link, opens in new window) Proc. SPIE Optics East 2006- Int. Conf. Optomechatronics Actuators, Manipulation, and Systems Control, SPIE Proc. Vol. 6374, Boston, MA, Oct. 2006, pp. 63740Z-1–63740Z-11.
[C69] Rostami, A., Ghanbari, A., and Janabi-Sharifi, F., “A micro-optical electromechanical system (MOEMS) for high precision displacement sensor design using ring resonator array,” (external link, opens in new window) Proc. SPIE Optics East 2006- Int. Conf. Optomechatronics Actuators, Manipulation, and Systems Control, SPIE Proc. Vol. 6374, Boston, MA, Oct. 2006, pp. 637410-1–637410-7.
[C68] Rostami, A., Yazdanpanah, A., and Janabi-Sharifi, F., “Physical parameters identification of nonuniform fiber Bragg gratings using interpolation method,” (external link, opens in new window) Proc. SPIE Optics East 2006- Int. Conf. Optomechatronics Actuators, Manipulation, and Systems Control, SPIE Proc. Vol. 6374, Boston, MA, Oct. 2006, pp. 63740Y-1–63740Y-11.
[C67] Ganji, Y., and Janabi-Sharifi, F., “Catheter kinematics and control to enhance cardiac ablation,” (external link, opens in new window) Proc. SPIE Optics East 2006- Int. Conf. Optomechatronics Actuators, Manipulation, and Systems Control, SPIE Proc. Vol. 6374, Boston, MA, Oct. 2006, pp. 63740U-1–63740U-8. (SPIE Best Conference Paper Award)
[C66] Talakoub, O., and Janabi-Sharifi, F., “A robust vision-based technique for human arm kinematics identification,” (external link, opens in new window) Proc. SPIE Optics East 2006- Int. Conf. Optomechatronics Actuators, Manipulation, and Systems Control, SPIE Proc. Vol. 6374, Boston, MA, Oct. 2006, pp. 63740Q-1–63740Q-8.
[C65] Masihtehrani, B., and Janabi-Sharifi, F., “Kinematic approach for the evaluation of human visual perceptibility in the workspace,” (external link, opens in new window) Proc. IEEE Int. Conf. Robot. Automat.: ICRA 2006, FA, May 2006, pp. 3648 – 3653.
[C64] Jain, M., Janabi-Sharifi, F., and Whelan, W.M., Kumaradas, J.C., “Model Predictive control of Laser Interstitial Thermal Therapy”, Proc. CAP Congress Conference, St. Catherines, Canada, 2006.
[C63] Jain, M., Kumaradas, J. C., Janabi-Sharifi, F., and Whelan, W.M., “Uncertainty and sensitivity analysis for a tissue laser-irradiation tissue model,” (external link, opens in new window) Proc. IEEE Canadian Conf. Electrical and Computer Engineering, May 2006, Ottawa, Canada, pp. 524–528.
[C62] Rostamianfar, O., Janabi-Sharifi, F., and Hassanzadeh, I., “Visual tracking system for dense traffic intersections,” (external link, opens in new window) Proc. IEEE Canadian Conf. Electrical and Computer Engineering, May 2006, Ottawa, Canada, pp. 1969–1973.
[C61] Ganji, Y., Janabi-Sharifi, F. Safavi-Naeini, S., “Towards real-time endocardial boundary detection from intracardiac echocardiographic images: A comparative study,” (external link, opens in new window) Proc. SPIE International Symposium on Medical Imaging '06, Proc. SPIE vol. 6147, Feb. 2006, San Diego CA, USA, pp. 61470-P1–61470-P10.
[B2] Janabi-Sharifi, F., (Editor), Optomechatronic Systems Control I, Proceedings of SPIE, vol. 6052, The International Society for Optical Engineering (SPIE), Bellingham, Washington, USA, 2005.
[J18] Janabi-Sharifi, F. and Liu, J., “Design of self-adaptive fuzzy tension controller for tandem rolling,” (external link, opens in new window) IEEE Trans. Industrial Electronics, vol. 52, no. 5, Oct. 2005, pp. 1428–1438.
[J17] Deng, L., Janabi-Sharifi, F., and Wilson, W.J., “Hybrid motion control and planning strategy for visual servoing,” (external link, opens in new window) IEEE Trans. Industrial Electronics, vol. 52, no. 4, Aug. 2005, pp. 1024–1040.
[J16] Janabi-Sharifi, F., “A neuro-fuzzy system for looper tension control in rolling mills,” (external link, opens in new window) Control Engineering Practice, vol. 13, no. 1, Jan. 2005, pp. 1–13.
[C60] Rostami, A., and Janabi-Sharifi, F., “An optoelectronic integrated ultrasound sensor for intravascular pressure detection using ring resonators,” (external link, opens in new window) invited paper, Proc. SPIE International Symposium on Optomechatronic Technology: Optomechatronic Systems Control Conference, Sapporo, Japan, Dec. 2005, pp. 60520I-1–60520I-7.
[C59] Deng, L., Janabi-Sharifi, F., and Hassanzadeh, I., “Comparison of combined vision/force control strategies for robot manipulators,” (external link, opens in new window) invited paper, Proc. SPIE International Symposium on Optomechatronic Technology: Optomechatronic Systems Control Conference, Sapporo, Japan, Dec. 2005, pp. 605202-1–605202-12 (SPIE Best Conference Paper Award).
[C58] Shademan, A., and Janabi-Sharifi, F., “Feature design for optimum directional motion resolvability,” (external link) Proc. SPIE International Symposium on Optomechatronic Technology: Optomechatronic Systems Control Conference, Sapporo, Japan, Dec. 2005, pp. 605207-1–605207-11.
[C57] Hassanzadeh, I., and Janabi-Sharifi, F., “An open architecture for hybrid force-visual servo control of robotic manipulators in unstructured environments,” (external link, opens in new window) Proc. SPIE International Symposium on Optomechatronic Technology: Optomechatronic Systems Control Conference, Sapporo, Japan, Dec. 2005, pp. 605205-1–605205-9.
[C56] Masih-Tehrani, B. and Janabi-Sharifi, F., “Kinematic analysis of the workspace for visual perceptibility,” Proc. IASTED Int. Conf. Robotics and Applications, Cambridge, MA, November 2005, pp. 220–225.
[C55] Shademan, A., and Janabi-Sharifi, F., “Sensitivity analysis of EKF and Iterated EKF for position-based visual servoing,” (external link, opens in new window) invited paper, Proc. IEEE Int. Conf. Control Applications, August 2005, Toronto, Canada, pp. 755–760.
[C54] Hassanzadeh, I., Janabi-Sharifi, F., Akhavan, R., and Yang, X., “Internet-based teleoperation of a mobile robot using shared impedance control scheme: A pilot study,” (external link, opens in new window) Proc. IEEE Int. Conf. Control Applications, August 2005, Toronto, Canada, pp. 346–351.
[C53] Deng, L., Wilson, W.J., and Janabi-Sharifi, F., “Decoupled EKF for simultaneous target model and relative pose estimation using feature points,” (external link, opens in new window) invited paper, Proc. IEEE Int. Conf. Control Applications, August 2005, Toronto, Canada, pp. 749-754.
[C52] Hosseini-Suny, K., Momeni, H., and Janabi-Sharifi, F., “Adaptive teleoperation systems design,” (external link, opens in new window) invited paper, Proc. IEEE Int. Conf. Control Applications, August 2005, Toronto, Canada, pp. 334–339.
[C51] Ganjefar, S., Janabi-Sharifi, F., Hosseinipanah, S.M.A., and Sharifi, R., “Prediction of delay time in Internet by neural network,” (external link, opens in new window) Proc. IEEE Int. Conf. Control Applications, August 2005, Toronto, Canada, pp. 340–345.
[C50] Ziaie-Rad , S., Janabi-Sharifi, F., Daneshpanah, M., Abdollahi, A., Ostadi, H., and Samani, H., “A practical approach to control and self–localization of Persia omni directional mobile robot,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Edmonton, Canada, August 2005, pp. 872–878.
[C49] Elahi-Bakhsh, A., Nili-Ahmadabadi, M., Janabi-Sharifi, F., and Arabi, B.N., “Learning distributed grasp in presence of redundant agents,” (external link, opens in new window) Proc. IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics: AIM 2005, July 2005, Monterey, CA, pp. 981–986.
[C48] Janabi-Sharifi, F., Jorjani, G., and Hassan-Zadeh, I., “Using adaptive neuro fuzzy inference system in developing an electrical arc furnace simulator,” (external link, opens in new window) invited paper, Proc. IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics: AIM2005, Monterey, CA, July 2005, pp. 1210–1215.
[J15] Mobahi, H., and Janabi-Sharifi, F., “Peak stick RBF network for online system identification,” WSEAS Trans. Systems, vol. 3, no. 2, April 2004, pp. 1015–1021.
[J14] Janabi-Sharifi, F., and Ficocelli, M., “Formulation of radiometric feasibility measures for feature selection and planning in visual servoing,” (external link, opens in new window) IEEE Trans. Systems, Man, and Cybernetics: Part B, vol. 34, no. 2, Apr. 2004, pp. 978–987.
[C47] Shademan, A. and Janabi-Sharifi, F., “Using scale-invariant feature key-points in visual servoing,” (external link, opens in new window) Proc. SPIE Optics East 2004 Conference, Philadelphia, PA, pp. 63–70, Oct. 2004.
[C46] Elahi-Bakhsh, A., Nili-Ahmadabadi, M., Janabi-Sharifi, F., and Arabi, B.N., “Distributed form closure for convex planar objects through reinforcement learning with local information,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS 2004, Sendai, Japan, Oct. 2004, pp. 3170–3175.
[C45] Elahi-Bakhsh, A., Nili-Ahmadabadi, M., Janabi-Sharifi, F., and Arabi, B.N., “Passive form closure around a rectangular object using four distributed Q-learning agents,” Proc. 9th Annual Conf. Computer Society of Iran, Tehran, Iran, 2004, pp.539–548.
[C44] Deng, L., Wilson, W.J., and Janabi-Sharifi, F., “Combined target model estimation and position-based visual servoing,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS 2004, Sendai, Japan, Oct. 2004, pp. 1395–1400.
[C43] Elahi-Bakhsh, A., Nili-Ahmadabadi, M., Janabi-Sharifi, F., and Arabi, B.N., “Passive form closure around rectangular objects using four distributed Q-learning agents,” Proc. 9th Annual Computer Society of Iran Conf., Tehran, Iran, June 2004.
[C42] Ganjefar, S., Momeni, H., Janabi-Sharifi, F., “Teleoperation systems control by regulating wave impedance in optimal wave variables method,” Proc. Iranian Electrical Engineering Conference, Mashhad, Iran, May 2004, pp. 198–204.
[C41] Shademan, A., Janabi-Sharifi, F., and Alirezaie, J., “Shape constrained discrete dynamic contours for noisy object segmentation,” (external link, opens in new window) Proc. Canadian Conference on Electrical and Computer Engineering: CCECE 2004, Niagara Falls, Canada, May 2004, pp. 1507–1510.
[C40] Janabi-Sharifi, F., and Shchokin, B., “A rotary parallel manipulator: Modeling and workspace analysis,” (external link, opens in new window) Proc. IEEE Int. Conf. Robotics and Automation: ICRA 2004, New Orleans, LA, April 2004, pp. 3671–3677.
[C39] Mobahi, H., and Janabi-Sharifi, F., “Peak Stick RBF network for online system identification,” (external link, opens in new window) Int. Joint Conf. on Neural Networks: IJCNN-2004, Budapest, Hungary, January 2004, pp. 2105–2111.
[J13] Ganjefar, S., Momeni, H.R., Janabi-Sharifi, F., and Hamidi-Beheshti, M.T., “Teleoperation systems control using augmented wave variables and Smith predictor methods by prediction of delay time,” (external link, opens in new window) Modarres Journal of Electrical Engineering, vol. 13, 2003, pp. 73–83.
[C38] Janabi-Sharifi, F. and Shademan, A., “An adaptive velocity estimation approach for improved disk drive control performance,” (external link, opens in new window) Proc. 29th Annual Conf. IEEE Industrial Electronics Society, IECON 2003, Roanoke, VA, Nov. 2003, pp. 1408–1413.
[C37] Deng, L., Wilson, W.J., and Janabi-Sharifi, F., “Dynamic performances of the position-based visual servoing method in the Cartesian and image spaces,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS 2003, Las Vegas, NV, Oct. 2003, pp. 510–515.
[C36] Shademan, A., and Janabi-Sharifi, F., “Adaptive velocity estimation for disk drive head positioning,” (external link, opens in new window) IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics: AIM 2003, Kube, Japan, July 2003, pp. 1134–1139.
[C35] Li, G., Janabi-Sharifi, F., Winitsky, L., Biglou, J., and Pinkus, M., “Virtual reality and tension control of hot steel looperless rolling,” Proc. 2003 IASTED Int. Conference on Modeling, Simulation, and Optimization: MSO 2003, Banff, Alberta, July 2003, pp. 204–209.
[C34] Ganjefar, S., Momeni, Janabi-Sharifi, F., Hamidi Beheshti, M.T., “Behavior of Smith predictor in teleoperation systems with modeling and delay time errors,” (external link, opens in new window) Proc. IEEE Conf. on Control Applications: CCA03, Istanbul, Turkey, June 2003, pp. 1176–1180.
[C33] Ganjefar, S., Momeni, H., Janabi-Sharifi, F., Hamidi Beheshti, M.T., (PDF file) “Prediction of delay time for teleoperation systems in augmented wave variables and Smith predictor,” (external link, opens in new window) Proc. 11th International Conference on Advanced Robotics: ICAR 2003, Coimbra, Portugal, June 2003, pp. 520–524.
[C32] Ganjefar, S., Momeni, H., Janabi-Sharifi, F., Hamidi Beheshti, M.T., “Smith predictor performance in teleoperation systems with errors,” Proc. 11th Iranian Conf. Electrical Engineering, ICEE2003, May 2003, Shiraz, Iran.
[C31] Ganjefar, S., Momeni, H., Janabi-Sharifi, F., Hamidi Beheshti, M.T., “Effects of delay time prediction in teleoperation systems,” Proc. 11th Iranian Conf. Electrical Engineering, ICEE2003, May 2003, Shiraz, Iran.
[BC5] Li, G., and Janabi-Sharifi, F., “Fuzzy tension control scheme for roughing and intermediate rolling mills,” Chapter in ASME Press Series on Intelligent Systems through Artificial Neural Networks- Smart Engineering System Design, Eds. C.H. Dagli et al., vol. 12, 2002, ASME Press, New York, pp. 347—352.
[BC4] Janabi-Sharifi, F., “Real-Time Feature Extraction with Application to Visual Servoing,” Chapter in Opto-Mechatronic Systems Handbook, Ed. H. Cho, CRC Press, Boca Raton, FL, 2002, pp.10-1—10-17.
[BC3] Janabi-Sharifi, F., “Feature Selection and Planning for Visual Servoing,” Chapter in Opto-Mechatronic Systems Handbook, Ed. H. Cho, CRC Press, Boca Raton, FL, 2002, pp. 14-1—14-25.
[BC2] Janabi-Sharifi, F., “Visual Servoing: Theory and Applications,” Chapter in Opto-Mechatronic Systems Handbook, Ed. H. Cho, CRC Press, Boca Raton, FL, 2002, pp. 15-1—15-24.
[C30] Li, G., Janabi-Sharifi, F., and Winitsky, L. “Decoupling of multiple stand interactions in looperless rolling control process,” (external link, opens in new window) Proc. IEEE International Conf. Industrial Technology: ICIT’02, Bangkok, Thailand, Dec. 2002, vol. 2, pp. 821–826.
[C29] Ganjefar, S., Momeni, H., Janabi-Sharifi, F., Hamidi Beheshti, M.T., “A novel teleoperation system design with integrated wave-variables and Smith predictor methods for time-delay treatment,” Proc. National Computer Conf., Mashahd, Iran, Dec. 2002, pp. 53–58.
[C28] Deng, L., Janabi-Sharifi, F., and Wilson, W. J., “Hybrid strategies for image constraints avoidance in visual servoing,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS 2002, Zurich, Switzerland, Oct. 2002, pp. 348–353.
[C27] Li, G., and Janabi-Sharifi, F., “Fuzzy tension control scheme for roughing and intermediate rolling mills,” Proc. Int. Conf. Artificial Neural Networks in Engineering: ANNIE 2002, St. Louis, MO, Nov. 2002, pp. 347–352.
[C26] Janabi-Sharifi, F., and Liu, J., “Neuro-fuzzy tension controller for tandem rolling,” (external link, opens in new window) Proc. IEEE Int. Symp. Intelligent Control, Oct. 2002, Vancouver, BC, Canada, pp. 309–314.
[C25] Janabi-Sharifi, F., and Liu, J., “Genetic fuzzy tension controller for tandem rolling,” (external link, opens in new window) Proc. IEEE Int. Symp. Intelligent Control, Oct. 2002, Vancouver, BC, Canada, pp. 315–320.
[C24] Ganjefar, S., Momeni, S., and Janabi-Sharifi, F., “Teleoperation systems design using augmented wave variables and Smith predictor method for reducing time-delay effects,” (external link, opens in new window) Proc. IEEE Int. Symp. Intelligent Control, Oct. 2002, Vancouver, BC, Canada, pp. 333–339.
[C23] Deng, L., Wilson, W.J., and Janabi-Sharifi, F., “Characteristics of robot visual servoing methods and target model estimation,” (external link, opens in new window) Proc. IEEE Int. Symp. Intelligent Control, Oct. 2002, Vancouver, BC, Canada, pp. 684–689.
[C22] Janabi-Sharifi, F. and Li, G., “Fuzzy multiple stand tension control of a roughing rolling mill,” (external link, opens in new window) Proc. IEEE Int. Conf. North American Fuzzy Information Processing Society: NAFIPS-FLINT 2002, New Orleans, LA, June 2002, pp. 560–565.
[C21] Deng, L., Janabi-Sharifi, F., and Wilson, W.J., “Stability and robustness of visual servoing methods,” (external link, opens in new window) Proc. IEEE Int. Conf. Robotics and Automation, Washington DC, May 2002, pp. 1604–1609.
[C20] Ganjefar, S., Momeni, H., and Janabi-Sharifi, F., “Design of teleoperation systems using wave-variables and Smith predictor methods for time delay effects compensation,” Proc. 10th ICEE (Iranian Conf. Elec. Eng.), Tabriz, Iran, May 2002, vol. 3, pp. 307–314.
[C19] Janabi-Sharifi, F., and Fan, J., “Fuzzy looper control with neural-net based tuning for rolling mills,” (external link, opens in new window) Proc. IEEE Int. Conf. Fuzzy Systems, Melbourne, Australia, Dec. 2001.
[C18] Ficocelli, M., and Janabi-Sharifi, F., “Radiometric measures for feature selection in visual servoing,” (external link) Proc. 27th Annual Conf. IEEE Industrial Electronics, IECON 2001, Denver, CO, Nov. 2001, pp. 404–409.
[C17] Janabi-Sharifi, F., “Neuro-Fuzzy looper control with T-operator and rule tuning for rolling mills: Theory and comparative study,” (external link, opens in new window) Proc. 27th Annual Conf. IEEE Industrial Electronics, IECON 2001, Denver, CO, Nov. 2001, pp. 58–63.
[C16] Janabi-Sharifi, F., “A neural-net based self-tuning fuzzy looper control for rolling mills,” (external link, opens in new window) invited paper, Proc. IEEE Int. Conf. Sys., Man, and Cybernetics, Tucson, AZ, Oct. 2001, pp. 87-92.
[C15] Ficocelli, M., and Janabi-Sharifi, F., “Adaptive filtering for pose estimation in visual servoing,” (external link, opens in new window) Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IROS 2001, Maui, Hawaii, Oct. 2001, pp. 19–24.
[J12] Janabi-Sharifi, F., Hayward, V., Chen, J., “Discrete-time adaptive windowing for velocity estimation,” (external link, opens in new window) IEEE Trans. Control Systems Technology, vol. 8, no. 6, Nov. 2000, pp. 1003–1009.
[C14] Janabi-Sharifi, F., and Fan, J., “Self-tuning fuzzy looper control for rolling mills,” (external link, opens in new window) Proc. IEEE Conf. Dec. and Control, CDC 2001, Sydney, Australia, Dec. 2000, pp. 376–381.
[C13] Janabi-Sharifi, F., and Fan, J., “A learning fuzzy system for looper control in rolling mills,” (external link, opens in new window) Proc. IEEE Int. Conf. Sys., Man, and Cybernetics, Nashville, TN, pp. 3722–3727, Oct. 2000.
[BC1] Wilson, W.J., Williams Hulls, C., and Janabi-Sharifi, F., “Robust image processing and position-based visual servoing,” Chapter in Robust Vision for Vision-Based Control of Motion, Ed. M. Vincze, and G. D. Hager, IEEE Press, New York, NY, 2000, pp. 163—201.
[C12] Janabi-Sharifi, F., “Image feature-based grasp planning for visual servo control,’’ invited paper, Proc. IEEE Int. Conf. Robotics and Automation: Workshop on Integrating Sensors with Mobility and Manipulation, San Francisco, CA, April 2000.
[J11] Janabi-Sharifi, F. and Wilson, W.J., “A fast approach for robot motion planning,” (external link, opens in new window) J. Intelligent and Robotic Systems, vol. 25, 1999, pp. 187–212.
[J10] Janabi-Sharifi, F. and Wilson, W.J., “Automatic grasp planning for visual-servo controlled robotic manipulators”, (external link, opens in new window) IEEE Trans. Systems, Man, and Cybernetics: Part B, vol. 28, no. 5, Oct. 1998, pp. 693–711.
[C11] Wilson, W.J., M. Hulls, C., and Janabi-Sharifi, F., “Issues and approaches for robust image processing in visual servoing,” invited paper, Proc. IEEE Int. Conf. Robotics and Automation: Workshop on Robust Vision for Vision-Based Control of Motion, Leuven, Belgium, May 1998.
[C10] Janabi-Sharifi, F., “A blackboard architecture for coordination of multiple robots,” Proc. CSME’98 FORUM, Toronto, Canada, vol. 4, pp. 1–5, May 1998.
[C9] Janabi-Sharifi, F., “A fuzzy-neural system for the navigation of a mobile robot,” Proc. CSME’98 FORUM, Toronto, Canada, vol. 4, pp. 58–62, May 1998.
[J9] Janabi-Sharifi, F. and Wilson, W.J., “Automatic selection of image features for visual servoing”, (external link, opens in new window) IEEE Trans. Robotics and Automation, vol. 13, no. 6, Dec. 1997, pp. 890–903.
[C8] Hayward, V., Janabi-Sharifi, F., and Chen, C-S., J., “Adaptive windowing discrete-time velocity estimation techniques: Application to haptic interfaces,” (external link, opens in new window) Proc. 5th IFAC Symp. Robot Control: SYROCO’97, October 1997.
[C7] Janabi-Sharifi, F. and Wilson, W.J., “A grasp planning approach for visual servo controlled robot manipulators,” (external link, opens in new window) Proc. 8th Int. Conf. Advanced Robotics: ICAR’97, Monterey, CA, July 1997.
[B1] Janabi-Sharifi, F. and Janabi-Sharifi, I., Introduction to Hydraulic Control, Nashr-Danesh Publishers, Tehran, 1984, 1990, 1995.
[J8] Janabi-Sharifi, F., "Collision: modeling, simulation and identification of robotic manipulators interacting with environments," (external link, opens in new window) J. Intelligent and Robotic Systems, vol. 13, no. 1, 1995, pp. 1–44.
[J7] Janabi-Sharifi, F. and Wilson, W.J., "An intelligent assembly robotic system based on relative pose measurements," (external link, opens in new window) J. Intelligent and Robotic Systems, vol. 12, no. 1, March 1995, pp. 49-86.
[J6] Mayorga, R.V., Janabi-Sharifi, F., and Wong, A.K.C., "A fast approach for the robust trajectory planning of redundant manipulators," (external link, opens in new window) J. Robotic Systems, vol. 12, no. 2, 1995, pp. 135–161.
[J5] Janabi-Sharifi, F., Wilson, W.J. and Wang, D., "On the contact behavior of manipulators colliding with viscoelastic environments," Int. J. Robotics and Automation, vol. 9, no. 3, 1994, pp. 116–129.
[J4] Rimrott, F.P.J. and Janabi-Sharifi, F., "Angular momentum of a torque-free deforming axisymmetric gyro," (external link, opens in new window) ASME J. Applied Mechanics, vol. 61, no. 1, 1994, pp. 117–123.
[C6] Janabi-Sharifi, F., Fakhry, H., and Wilson, W.J., "Integration of a robust trajectory planner with a feed-forward neural controller for robotic manipulators,” (external link, opens in new window) Proc. IEEE Int. Conf. Robotics and Automation, San Diego, CA, May 1994.
[C5] Mayorga, R.V., Janabi-Sharifi, F. and Wong, A.K.C., "A simple approach for the collision avoidance of telerobotic manipulators," (external link, opens in new window) Proc. IEEE Int. Conf. Robotics and Automation, San Diego, CA, May 1994.
[J3] Janabi-Sharifi, F., Wilson, W.J. and Pang, G.K.H., "A multi-layered learning model," (external link, opens in new window) J. Intelligent and Robotic Systems, vol. 8, no. 3, 1993, pp. 399–423.
[C4] Mayorga, R.V., Janabi-Sharifi, F. and Wong, A.K.C., "An approach for robust trajectory planning of redundant manipulators," Proc. Int. Conf. Advanced Robotics, ICAR'93, Japan, 1993.
[C3] Janabi-Sharifi, F. and Vinke, D., "Robot path planning by integrating the artificial potential field approach with simulated annealing," (external link, opens in new window) Proc. IEEE Int. Conf. Systems, Man and Cybernetics, Le Touquet, France, Oct. 1993.
[C2] Mayorga, R.V., Janabi-Sharifi, F. and Wong, A.K.C., "A robust approach for the on-line obstacle avoidance of robotic manipulators," Proc. IASTED Int. Conf. Robotics and Automation, Oxford, UK, Sep. 1993.
[C1] Janabi-Sharifi, F. and Vinke, D., "Integration of the artificial potential field approach with simulated annealing for robot path planning," (external link, opens in new window) Proc. IEEE Int. Symp. Intelligent Control, Chicago, IL, Aug. 1993.
[J2] Rimrott, F.P.J. and Janabi-Sharifi, F., "A torque-free flexible model gyro," (external link, opens in new window) J. Applied Mechanics, vol. 59, no. 1, 1992, pp. 7–15.
[J1] Guran, A., Rimrott, F.P.J., and Janabi-Sharifi, F., "On the stability of viscoelastic spinning columns," (external link, opens in new window) Mechanics of Structures and Machines, vol. 19, no. 4, 1991, pp. 437–455.