Research Projects
Modeling, Design, and Development of Cardiovascular Devices
Catheters and guidewires are long flexible devices that are percutaneously introduced into the vasculature and then navigated to desired anatomical targets of interest for diagnostic purposes or delivery of therapy. A fundamental challenge in catheter-based cardiovascular interventions is that accurate and reliable navigation of these devices and control of their mechanical engagement with the anatomy of interest is extremely difficult. We research on modeling the interaction of the catheter with the anatomy and understand the effects of tissue morphology on quantitative device performance metrics, as well as developing new solutions and tools that overcome the limitations of existing systems and devices.

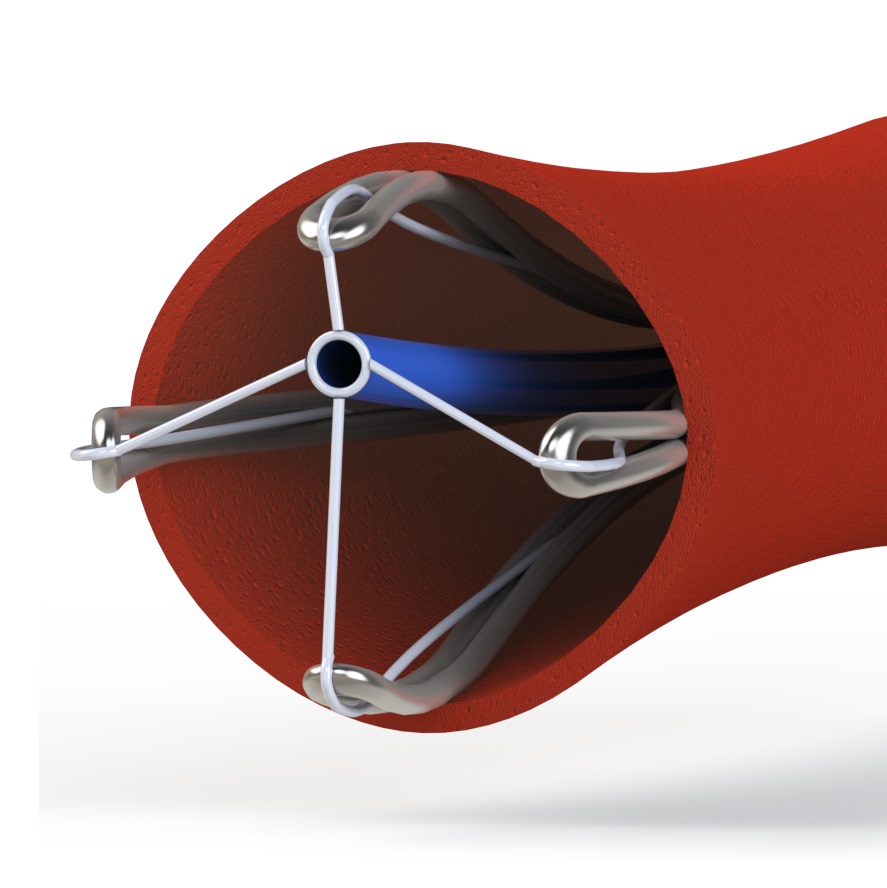
Expandable-Cable Driven Parallel Manipulators (X-CADPAM)
Unlike conventional robots with rigid links, CADPAMs utilize cables attached to the end effector to create motion. They are routed around a large fixed frame to produce relative movement of the end effector. They provide many advantages over rigid-link mechanisms such as a larger workspace, a higher payload-weight ratio, and low manufacturing and assembly costs. These systems require a rigid frame to act as a leverage point and geometric reference for the cables. However, the large size of such frames hinders their use for applications where region access is limited due to size constraints. We aim to address these limitations by modeling, design, and development of an expandable-CADPAM (X-CADPAM) with a frame that is biased to expand but can be contracted. This permits travel through a narrow passageway, and then expansion once the desired target area is reached.
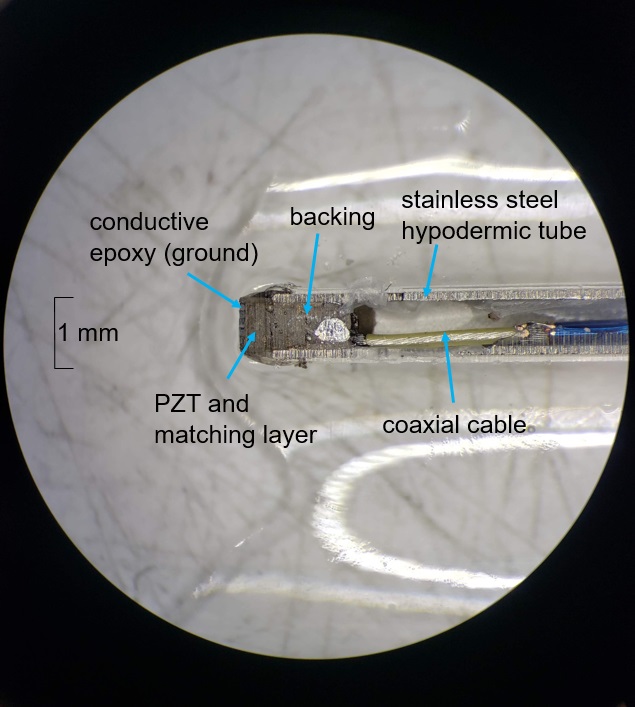
Imaging Instruments for Minimally Invasive Cardiovascular Interventions
Conventional interventional ultrasound imaging instruments (e.g., catheters) are hindered by limitations in transducer size and have limited imaging field of view (FOV). As a result, all existing commercially available ultrasound imaging catheters are “side-looking,” which limits their applications. Furthermore, visualization and tracking of the therapeutic device relative to the obtained ultrasound images and anatomy continue to be a significant challenge. We research on developing new methods that allow for forward-looking imaging catheters that allow for large FOV volumetric 3D images, with intrinsic device tracking and registration, allowing for a complete image-based navigation platform.
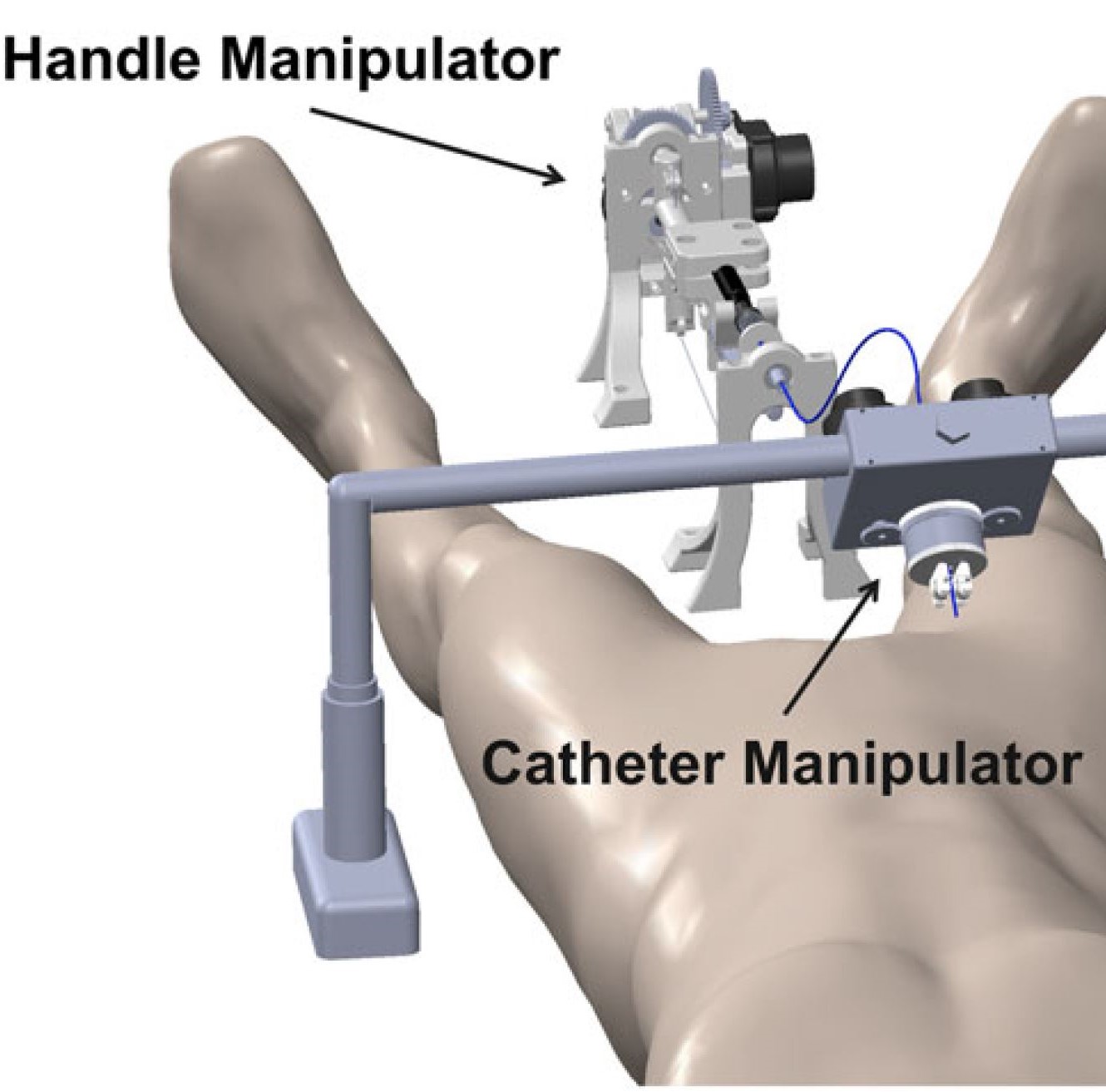
Medical Robots for Cardiovascular Interventions
Catheter based cardiovascular procedures are conventionally guided with fluoroscopic imaging. However, fluoroscopic imaging is a source of radiation that exposes the interventionalists and staff to scattered radiation on a daily basis, necessitating the use of leaded aprons for protection. These heavy radiation protection garments provide only partial protection and their prolonged use is known to cause chronic neck and back pain. To address this challenge, several remote catheter navigation systems (master– slave) have been developed that are now commercially available. However, limitations such as costs, compatibility, and performance, have hindered their widespread adoption. We research on developing new robotic based solutions that overcome the limtiations of existing remote catheter navigation systems.